

A sucker track-driven bionic device for climbing on smooth surfaces
A crawler-driven, smooth-surface technology, applied in crawler vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of low movement speed, discontinuity, not independence, etc., to achieve the effect of simple structure and improved environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
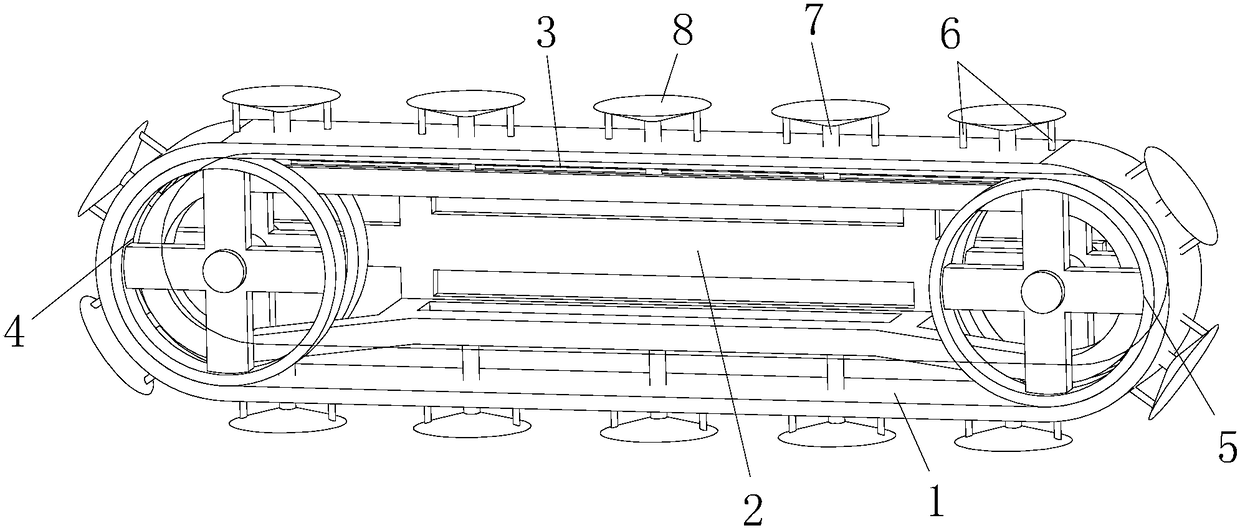
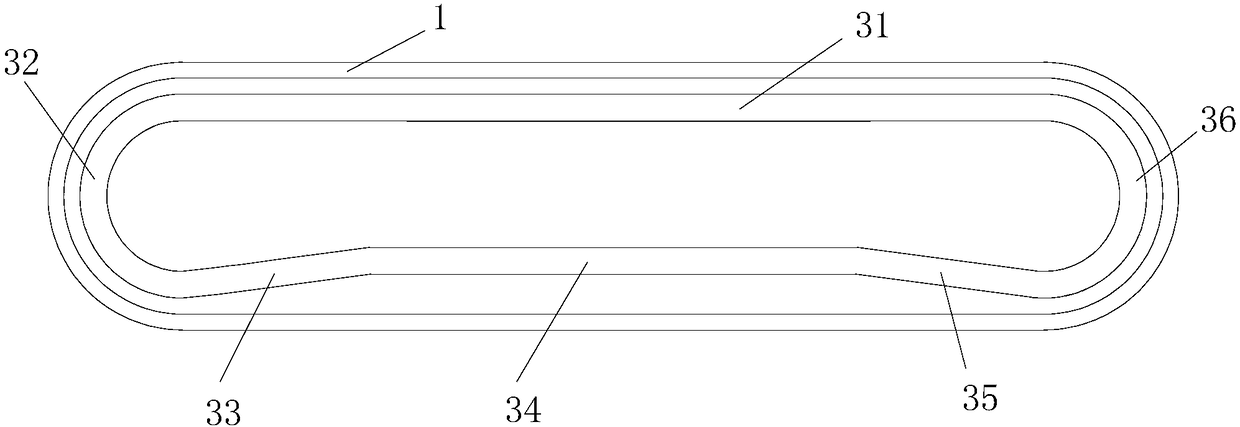
[0027] Such as figure 1 with figure 2 As shown, a suction cup crawler-driven bionic device for climbing on a smooth surface includes a frame 2, a ring guide rail 3 is arranged on the frame 2, a driving wheel 4 and a tensioning wheel 5 are also arranged on the frame 2, and the driving wheel 4 is driven by a motor, and the annular guide rail 3 bypasses the driving wheel 4 and the tensioning wheel 5, and the outer ring of the driving wheel 4 and the tensioning wheel 5 is equipped with an annular crawler belt 1, and the annular crawler belt 1 is located outside the annular guide rail 3 There are several vacuum suction cups 8 distributed at equal intervals on the periphery of the annular crawler 1, and a main handle 7 is arranged on the side where each vacuum suction cup 8 is connected with the annular crawler 1, and one end of the main handle 7 is connected with the vacuum suction cup 8, and the other end is connected with the vacuum suction cup 8. A main handle tension applying...
Embodiment 2
[0034] The structure and principle of the second embodiment and the first embodiment are basically the same, the only difference is: the gap between the original ring guide rail 3 and the ring track 1 becomes larger, that is, the side where the ring track 1 is in contact with the surface to be climbed On the inner side, a plurality of first permanent magnets are set to form an approximately uniform magnetic field, and a second permanent magnet is set on the main handle 7, which skillfully avoids contact and friction, and also applies a pulling force to the main handle 7 to make the vacuum chuck 8 to generate negative pressure.
[0035] The parts not mentioned in the present invention can be realized by adopting or referring to the prior art.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More