

Method and device used for controlling plant protection work of unmanned plane
A technology for drones and operations, applied in the field of drones, can solve problems such as poor precision, blind areas of vision, waste, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0022] figure 1 It is a flowchart of a method for controlling UAV plant protection operations provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of UAV plant protection, and the method can be controlled by UAV plant protection operations provided by the embodiment of the present invention. implemented by a device, which can be implemented in software or hardware, such as figure 1 shown, including:
[0023] S101. Obtain the geographic coordinates of the farmland area to be operated.
[0024] Specifically, for an area of farmland to be operated, GPS positioning technology can be used to lock the geographical coordinates of the area of farmland to be operated on the map.
[0025] S102. According to the geographic coordinates, plan a flight route for the drone plant protection operation.
[0026] Wherein, the route is the flight route of the UAV, including two waypoints, which are respectively located on the border of the farml...
Embodiment 2
[0046] figure 2 It is a flow chart of a method for controlling UAV plant protection operations provided by Embodiment 2 of the present invention. On the basis of the above embodiments, this embodiment further includes planning to supplement medicine for UAVs according to at least one of the following influencing factors. Liquid and / or power supply belt: the geographical coordinates, the maximum power supply of the UAV and the maximum amount of medicine carried by the UAV, such as figure 2 shown, including:
[0047] S201. Obtain the geographic coordinates of the farmland area to be operated.
[0048] S202. Plan a route for UAV plant protection operations according to the geographic coordinates, and plan a supply belt for replenishing medicinal liquid and / or electricity for the UAV according to at least one of the following influencing factors: the geographic coordinates, unmanned The maximum power supply of the drone and the maximum load capacity of the drone.
[0049] Whe...
Embodiment 3
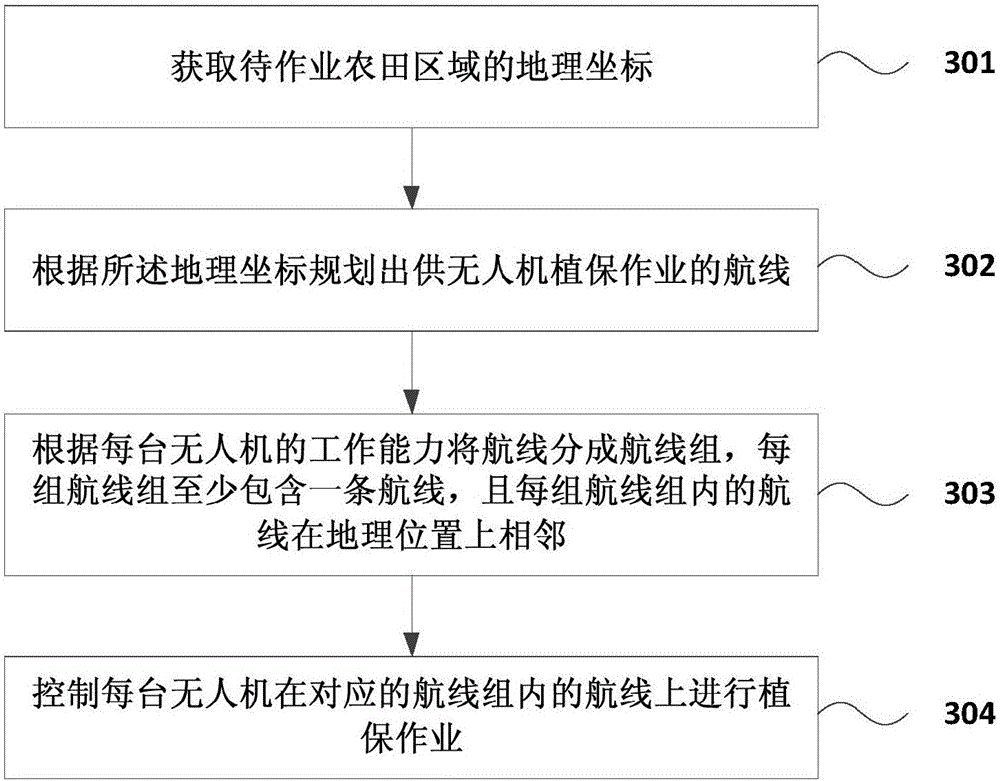
[0055] image 3 It is a flow chart of a method for controlling UAV plant protection operations provided by Embodiment 3 of the present invention. On the basis of the above embodiments, this embodiment plans a route for UAV plant protection operations according to the geographical coordinates It further includes: dividing the routes into route groups according to the working capabilities of each drone, each group of route groups contains at least one route, and the routes in each group of route groups are geographically adjacent, and the working capabilities include at least one of the following Items: geographical coordinates, the maximum power supply of the UAV, the maximum amount of medicine carried by the UAV, the power consumption required to return to the nearest supply belt, and the amount of medicine sprayed when returning to the nearest supply belt; correspondingly, the drone will be controlled The human-machine performs plant protection operations according to the pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More