Fully-automatic intelligent inspection robot
An intelligent inspection and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that cannot guarantee timing, fixed-point, quantitative inspection tasks, etc., to achieve reliable real-time detection capabilities, avoid omissions, and ensure the environment safe effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
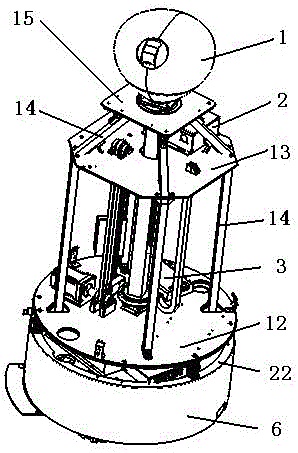
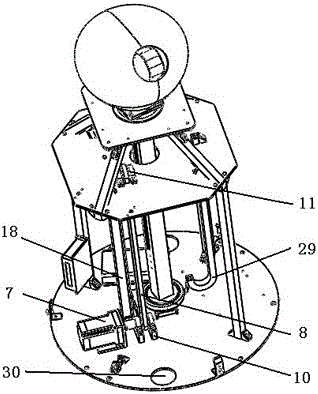
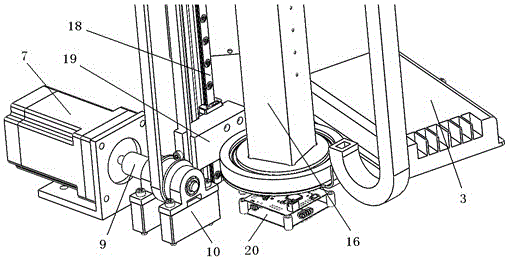
[0022] Such as figure 1 , a fully automatic intelligent inspection robot, which includes an upper image acquisition terminal 1, a lifting device, an attitude controller 2, a gyroscope sensor, a main controller 3, a power supply component, a motion controller 5, a driving device 6 and a remote control platform, wherein: the upper image acquisition terminal 1 is a camera. The lifting device is composed of a driving motor 7, a loop belt 8, a connecting shaft 9, a first bearing block assembly 10, a second bearing block assembly 11, a first fixed disc 12, a connecting disc 13, a connecting frame 14, and a collection end fixed platform. 15. Elevating rod 16, lifting slide rail 18, guide rail and connection block 19 are formed, wherein, first fixed disk 12 and connecting disk 13 are connected by connecting frame 14, and first fixed disk 12 after connection is parallel to connecting disk 13.
[0023] The connection plate 13 is connected with the collection end fixed platform 15 throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More