

Biped walking parameter measuring method and apparatus
A measurement method and parameter technology, applied in the field of robotics, can solve the problems of not being able to obtain the corresponding relationship, not being able to get the change situation, and not being able to distinguish the support period of single and double feet, so as to achieve the effect of stable walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
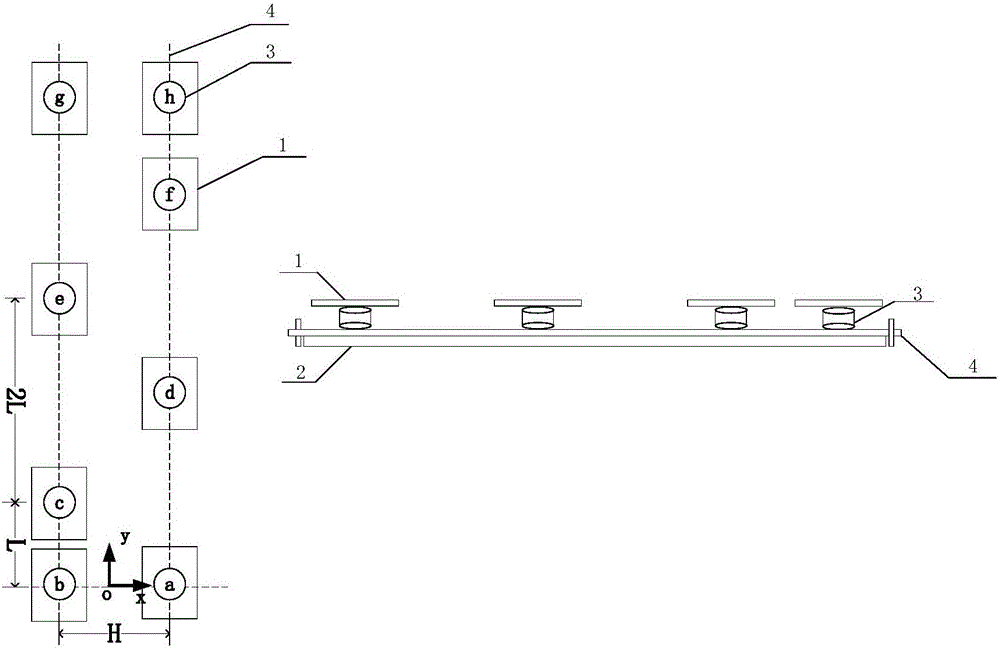
[0024] The device for measuring the walking parameters of the biped walking process based on the distributed six-dimensional force sensor proposed by the present invention consists of three parts:
[0025] (1) Zero-moment point measurement system: first establish as figure 2 The world coordinate system xoy shown, figure 2 The left side is a top view, figure 2 The right side is the left view, press the N six-dimensional force sensors 3 (a...h) as figure 2 As shown, it is installed on the guide rail 4 between the bottom steel plate 2 and the top glass plate 1. The value of N can be selected according to the actual number of measurement steps S, where N=S+2, the placement of each six-dimensional force sensor The spacing can be adju...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More