

Blood coagulation analyzer dynamic barrier avoiding path planning method based on optimization artificial potential field method
An artificial potential field method and path planning technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem that the mobile robot cannot reach the target, not the local stable point of the entire potential field, and the mechanical arm The problem of not reaching and so on, to achieve the effect of solving the problem of local stable points, stable speed and smooth motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
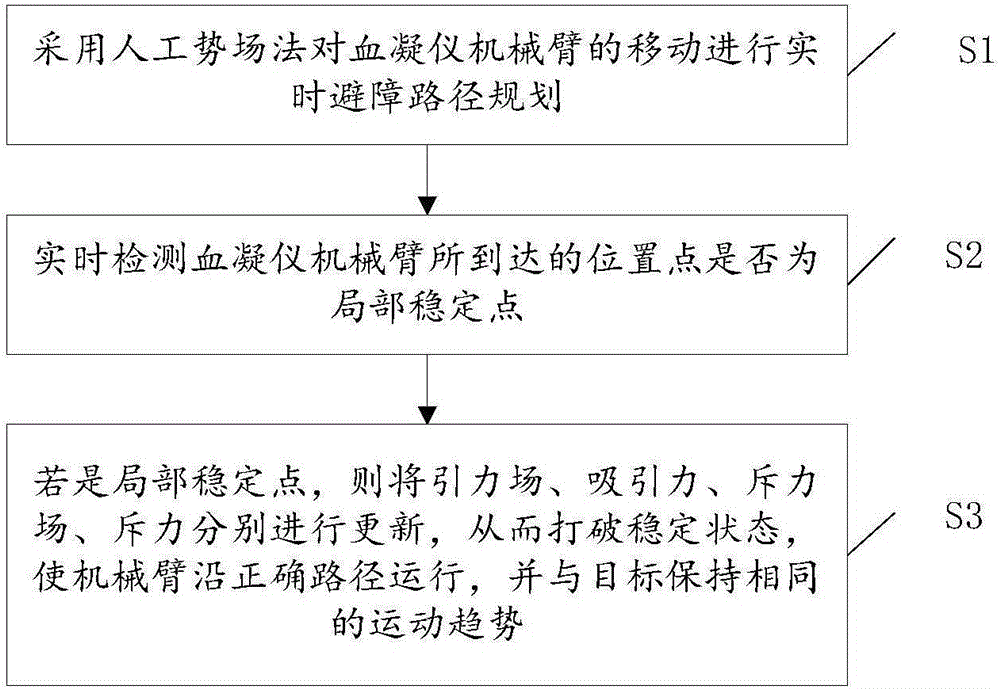
[0027] Such as figure 1 As shown, the blood coagulation instrument dynamic obstacle avoidance path planning method based on the optimized artificial potential field method of the present embodiment includes the following steps:
[0028] S1. Use the artificial potential field method to plan the real-time obstacle avoidance path for the movement of the mechanical arm of the coagulation meter.
[0029] The function of the traditional potential field is:
[0030] The gravitational field is:
[0031] The repulsion field is:
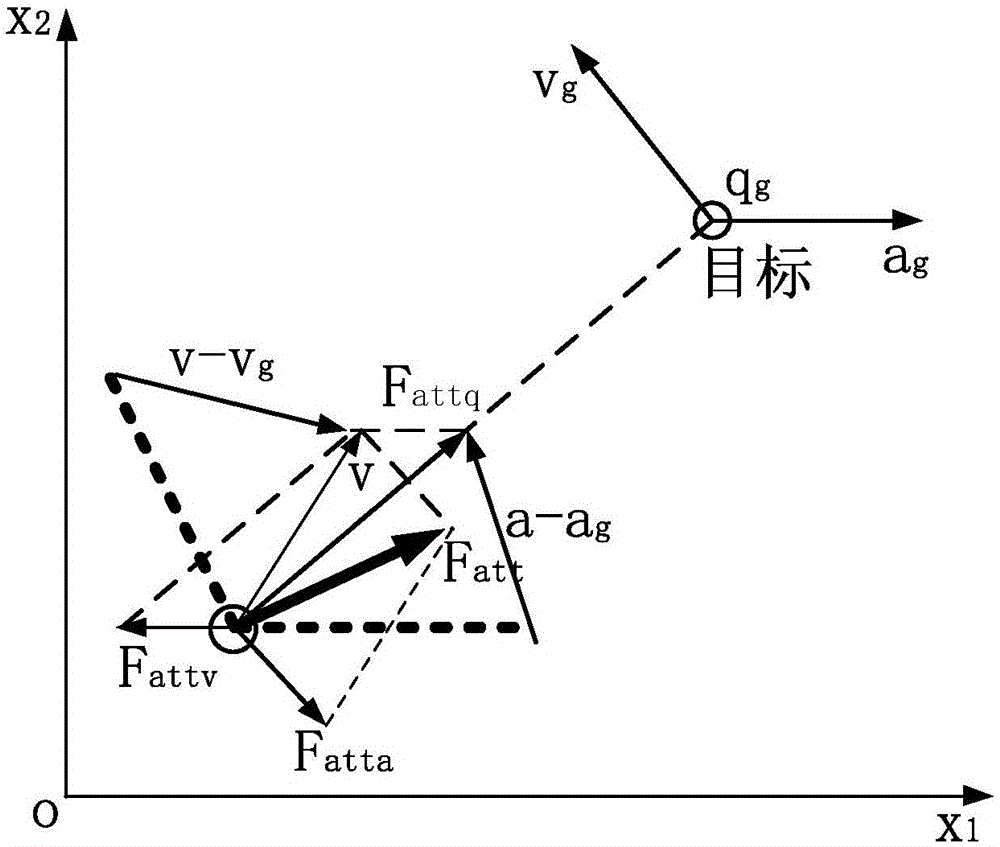
[0032] Gravity is: F att (q)=-ζ(q-q g )
[0033] The repulsion is:
[0034] Among them, ρ g (q)=||q-q g || refers to the distance from the robot arm to the target, q, q g Respectively refer to the positions of the manipulator and the target, ζ and η are proportional coefficients, ρ 0 Refers to the maximum range of the repulsive force of the obstacle, ρ(q) refers to the minimum distance between the obstacle and the robot arm,
[0035] S2. Rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More