High-precision positioning motion planning algorithm based on damping attenuation
A motion planning and precise positioning technology, applied in instruments, adaptive control, control/regulation systems, etc., can solve problems such as large amount of calculation, inconvenient implementation of embedded motion controllers, and insufficient consideration of the impact of system structural damping, etc. To achieve the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
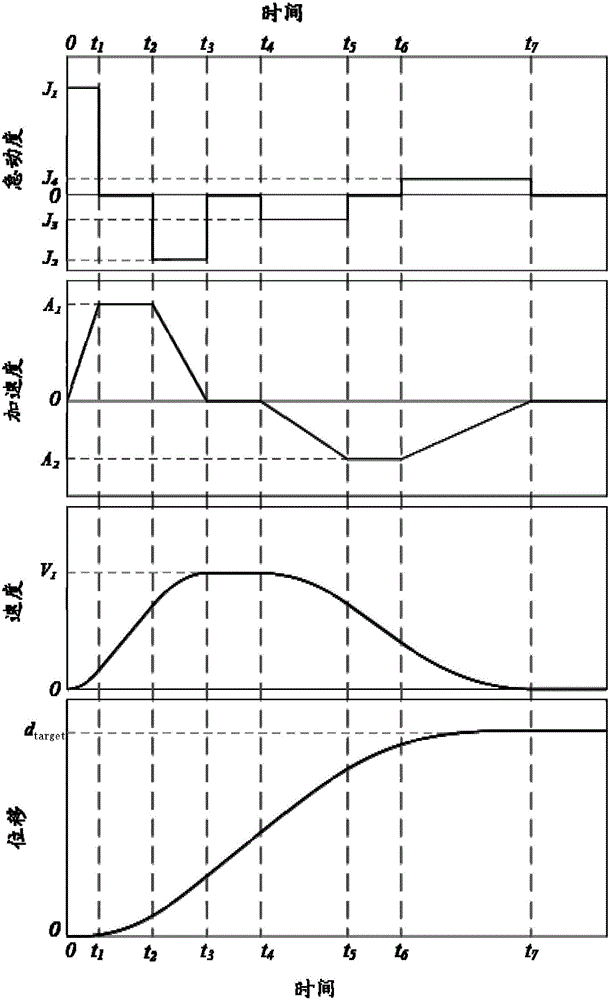
[0037] Such as Figure 4 As shown, the highly precise positioning motion planning algorithm based on damping attenuation in this embodiment includes the following steps:
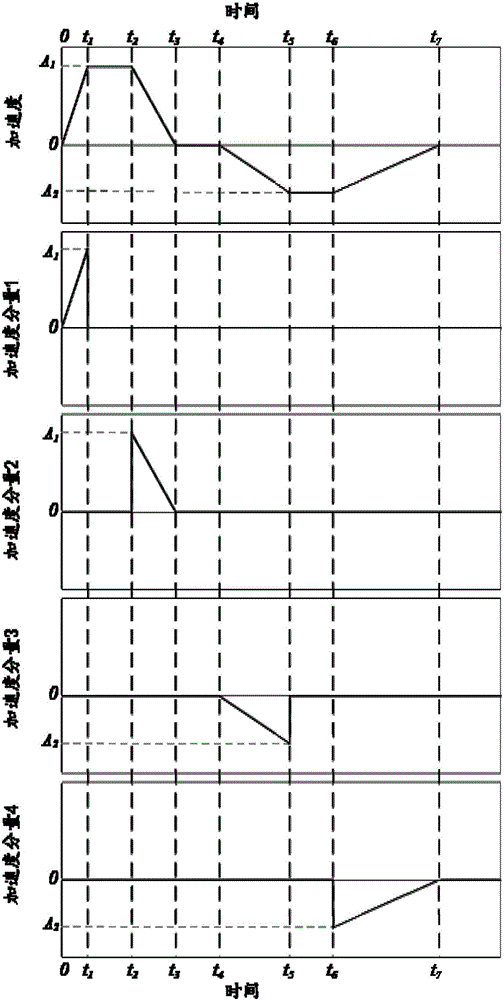
[0038] S1. Parameterize the motion planning curve, and obtain the acceleration curve interval segment corresponding to the interval segment whose jerk is not 0 in the motion planning curve, that is, obtain the interval segment R1, R2...Rn and the corresponding interval segment in the acceleration curve with acceleration changes The time difference Δt between the end moment of R1, R2...Rn and the end moment of motion planning 1 ,Δt 2 ,…,Δt n ;
[0039] S2. Extract the acceleration input signal A corresponding to each section of the acceleration curve R1, R2...Rn in step S1 1 ,A 2 ,...,A n ;
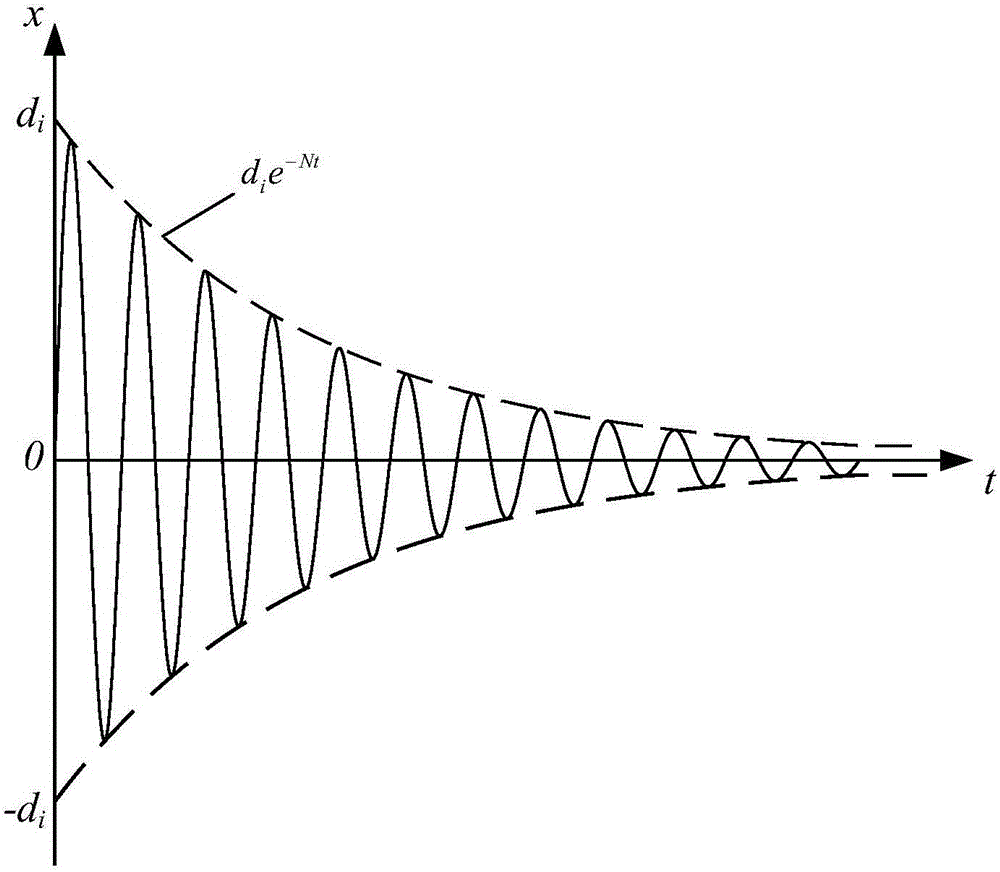
[0040] S3, obtain each acceleration input signal A described in step S2 through the transfer function of the motion system 1 ,A 2 ,...,A n The amplitude d of the corresponding displacement output response in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com