

Model-free self-adaptive control method for water well drilling rig propelling device and system
A model-free self-adaptive, water well drilling rig technology, applied in the drilling automatic control system, fluid pressure actuating device, fluid pressure actuating system components, etc., can solve problems such as poor robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0086]The present invention provides a model-free self-adaptive control method and system for a propulsion device of a water well drilling rig, aiming at interference factors such as model uncertainty, unmodeled dynamics and external sediment in the propulsion system of the water well drilling rig. In the water well drilling rig propulsion system, the hydraulic cylinder is used as the propulsion device, and the model-free adaptive control method and system of the water well drilling rig propulsion system are described in detail.
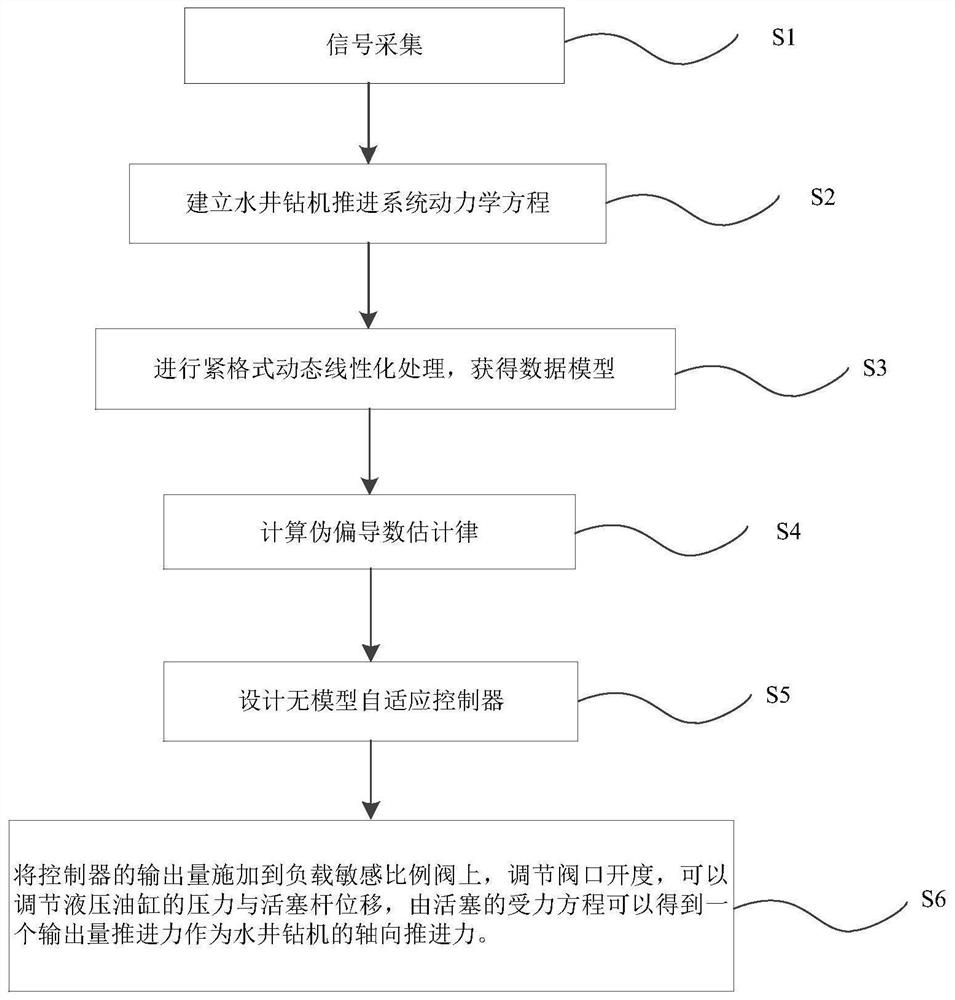
[0087] see figure 1 As shown, the model-free adaptive control method of the water well drilling rig propulsion system in this embodiment specifically includes the following steps:
[0088] Step S1: signal collection and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More