

Distributed multi-robot dynamic network connectivity control method
A dynamic network and multi-robot technology, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problems of communication link interruption, network communication cost increase, etc., to overcome communication problems Effects of link interruption, communication load reduction, and enhanced scalability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
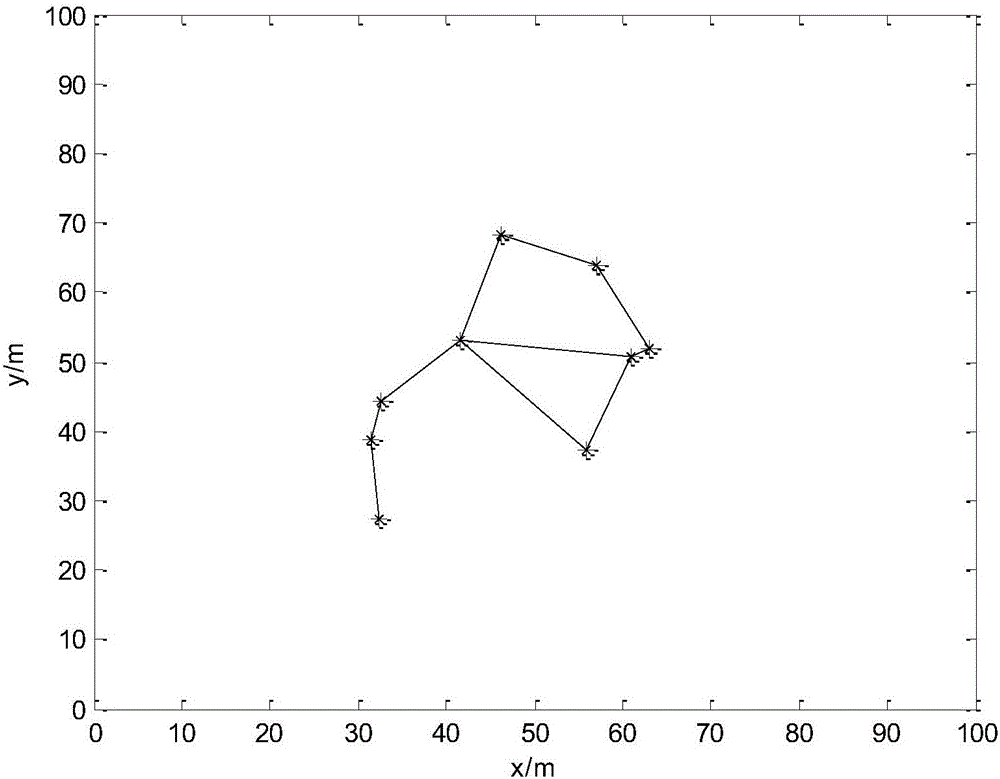
[0074] In this example, the multi-robot network consists of 9 robot nodes, whose initial positions are randomly and evenly distributed in a space of 100m×100m, and the critical transmission distance d c =25m, the propagation attenuation coefficient is α=2, and the threshold of successful transmission probability is δ=e -1 . By calculating the second smallest eigenvalue λ of the Laplace matrix 2 And network global information connectivity U gm To evaluate the ability of the present invention to control and improve the connectivity of the multi-robot network.
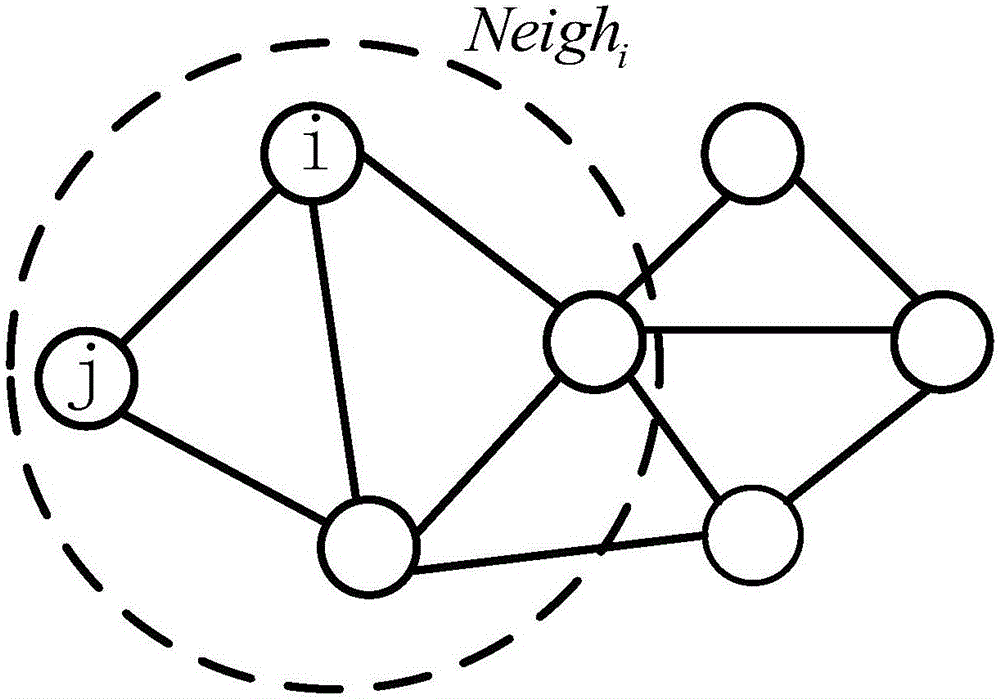
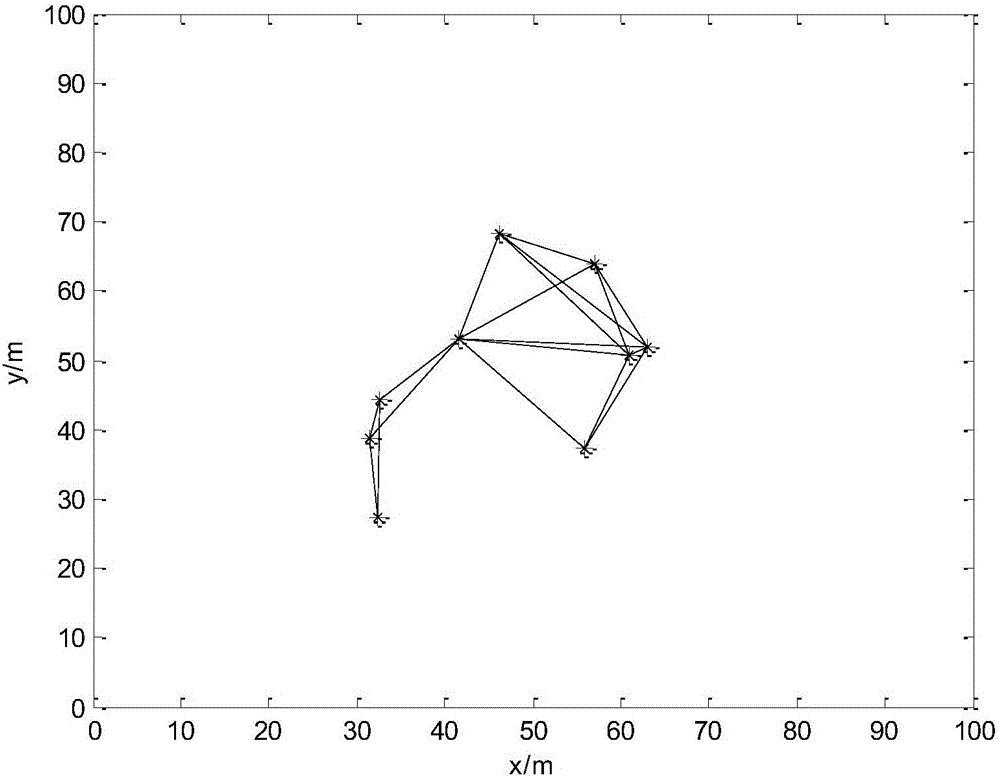
[0075] In order to illustrate the effect of the present invention, in the control input u i Random disturbance ξ i , The perturbation obeys a uniform distribution on (-1,1), and the simulation time is 120 seconds. Compare this method with all neighbors Neigh i Keep connected and control input u i =0 control effect.
[0076] figure 2 Neigh for adoption with all neighbors i Keep connected and control input u i = 0 network topo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More