

Point cloud based indoor dynamic scene SLAM (Simultaneous Location and Mapping) method and system
A technology of dynamic scenes and probability maps, applied in 2D image generation, image analysis, instruments, etc., can solve problems such as easy failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0093] During specific implementation, the process provided by the technical solution of the present invention can be automatically run by those skilled in the art using computer software technology. In order to better understand the technical solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
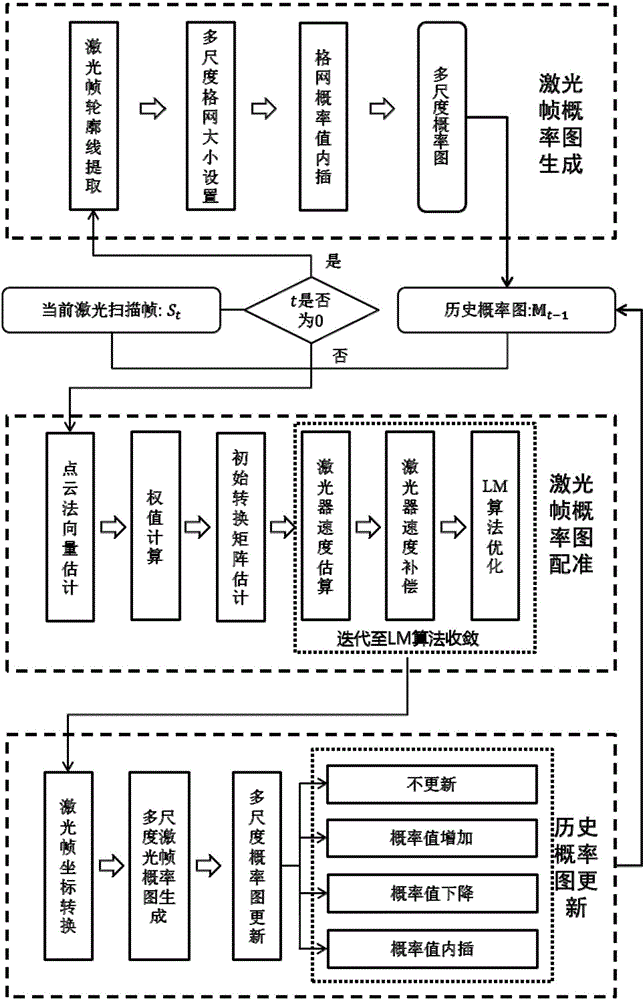
[0094] See attached figure 1 , the embodiment of the present invention includes the following steps:
[0095] Step 1: First judge whether t=0, that is, whether the current laser scanning frame is the first frame, and if so, generate the probability map of the current frame and set the historical probability plot directly Then wait for the next frame, when t is not 0, go to step 2.
[0096] During specific implementation, the current laser scanning frame may be judged at the beginning of the process to determine whether t=0. If the current frame is the first frame, that i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More