

Flexible joint driving device and method for minimally invasive surgical instrument
A technology of minimally invasive surgery and flexible joints, which is applied in the field of minimally invasive surgical medical equipment, can solve problems such as inflexible operation, difficult operation, and insufficient operating force, and achieve simple and reliable methods, flexible and precise movements, and large operating force. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
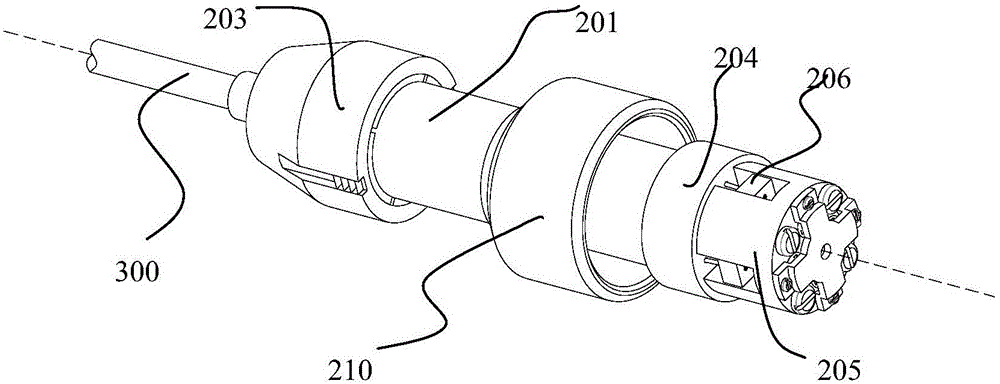
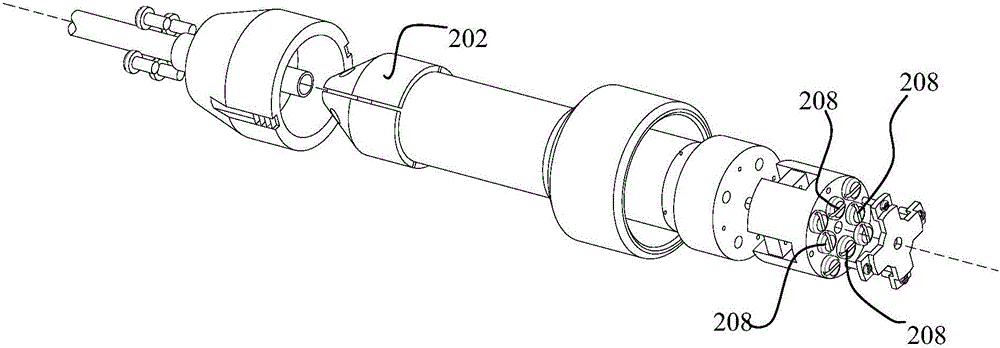
[0021] Such as figure 1 , 2 , The driving device for the flexible joint of the minimally invasive surgical instrument of the present invention shown in 3 includes a wrist driving device 200, and the wrist driving device 200 includes a driving hose 201, and at the front end of the driving hose 201 A conical core 202 is fixedly installed, and a connecting shell 203 is fixedly installed on the conical core 202, and the connecting shell 203 is used to fix the connecting conduit 300, and a device for installing is fixedly installed on the rear end of the driving hose 201 And a tensioning device for tensioning the driving steel wire 207, the tensioning device includes a tensioning block 204 fixed on the driving hose 201, and a tensioning frame 205 is fixed at the rear end of the tensioning block 204, A plurality of sliding grooves a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More