

Control method for robot to grab object based on coordinated operation of hand, eyes and arm
A control method and coordinated operation technology, applied in program control, general control system, control/regulation system, etc., can solve problems such as low efficiency, poor flexibility, and inaccurate force control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
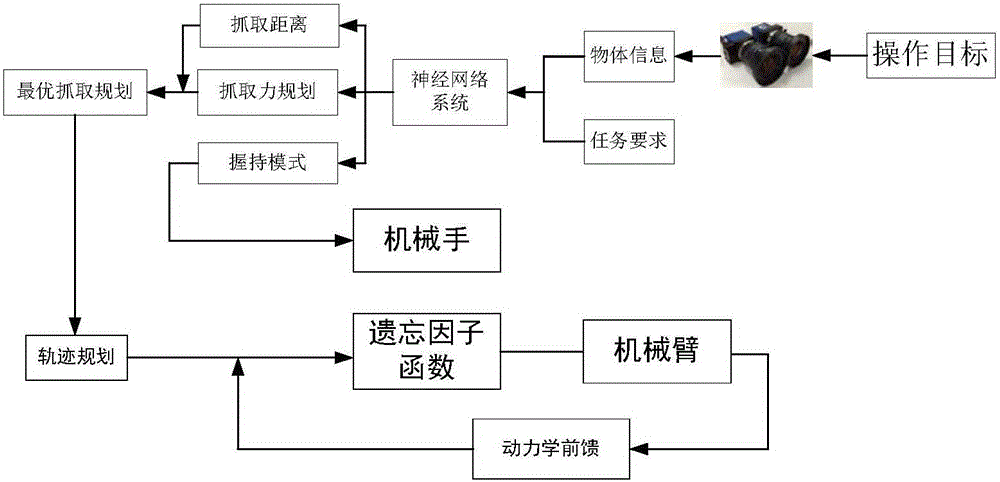
[0038] refer to figure 1 , a control method for a robot grabbing an object based on hand, eye, and arm coordinated operations, wherein the robot has a manipulator, a manipulator, a binocular vision system, a neural network system, and a control system; the control method includes the following steps :
[0039] (1) Obtain object-related information through the binocular vision system.
[0040] The object-related information includes physical information and position information, and the physical information further includes shape information and quality information of the object; the position information includes position information and attitude information.
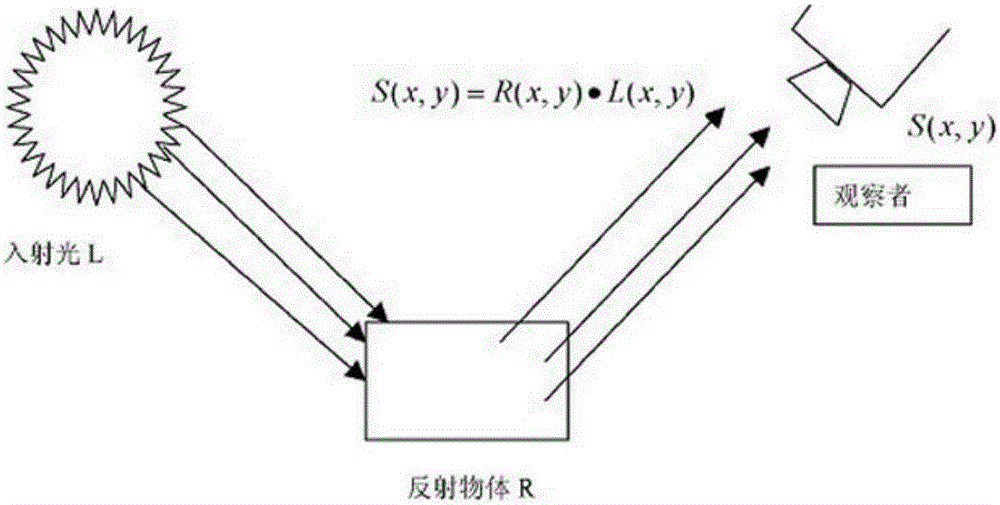
[0041] In the case of drastic changes in light intensity, the binocular vision system performs image enhancement on the collected image of the object based on the Retinex method, so as to identify and locate the object.
[0042] The basis of the Retinex theory is that the color of an object is determined by the object's ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More