Finger transmission device of multi-joint robot
A multi-joint robot and transmission device technology, applied in the field of robotics, can solve the problem of less movement of the finger structure of space-driven robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and examples. The following examples are only used to illustrate the technical solutions of the present invention more clearly, but not to limit the protection scope of the present invention.
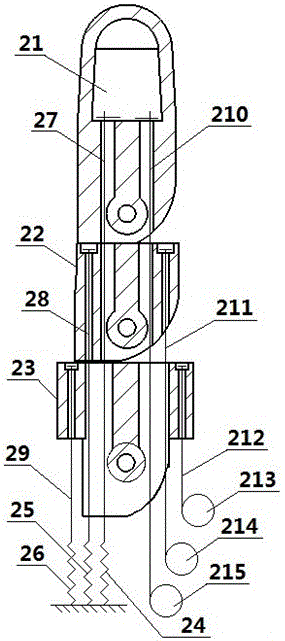
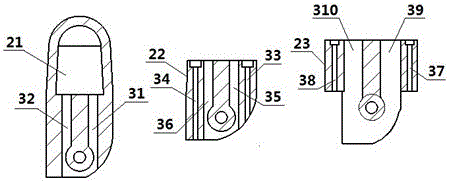
[0017] like figure 2 and image 3 As shown, the technical solution of the present invention is to design a multi-joint robot finger transmission device, including a first finger joint 21, a second finger joint 22, a third finger joint 23, a return spring one 24, a return spring two 25, and a return spring Three 26, rebound rope one 27, rebound rope two 28, rebound rope three 29, tension rope one 210, tension rope two 211, tension rope three 212, motor output disk one 213, motor output disk two 214 And motor output disc three 215.
[0018] The first knuckle 21 has a mounting groove 31 for the tension rope 1 of the first knuckle and a mounting groove...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More