

Three-dimensional active suspension space vehicle microgravity simulation device
A space vehicle and microgravity simulation technology, which is applied to the simulation device of space navigation conditions, transportation and packaging, space navigation equipment, etc., can solve problems such as the inability to complete the three-dimensional space movement experiment of space vehicles, achieve no time limit, reduce The effect of device weight and large simulation space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
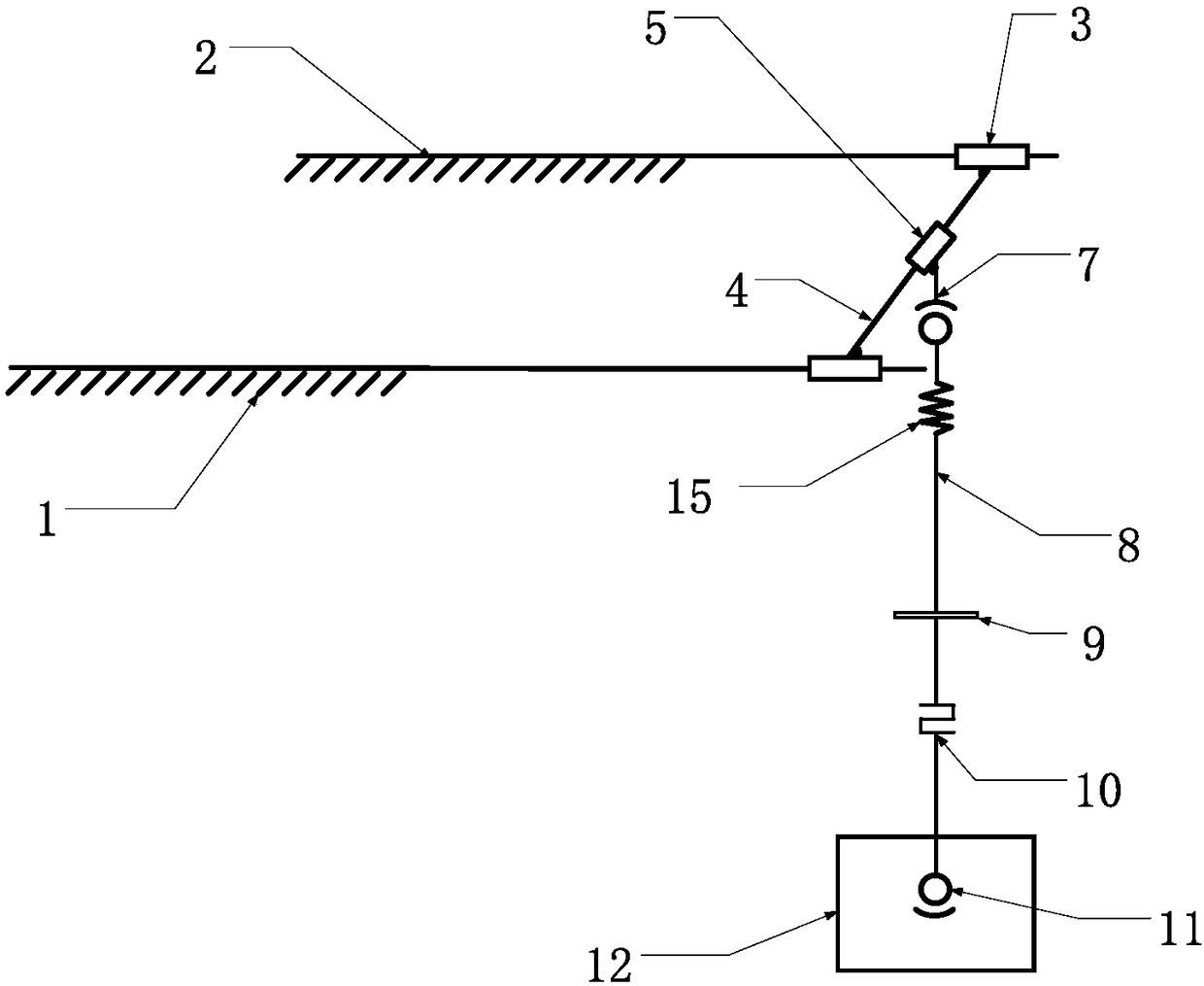
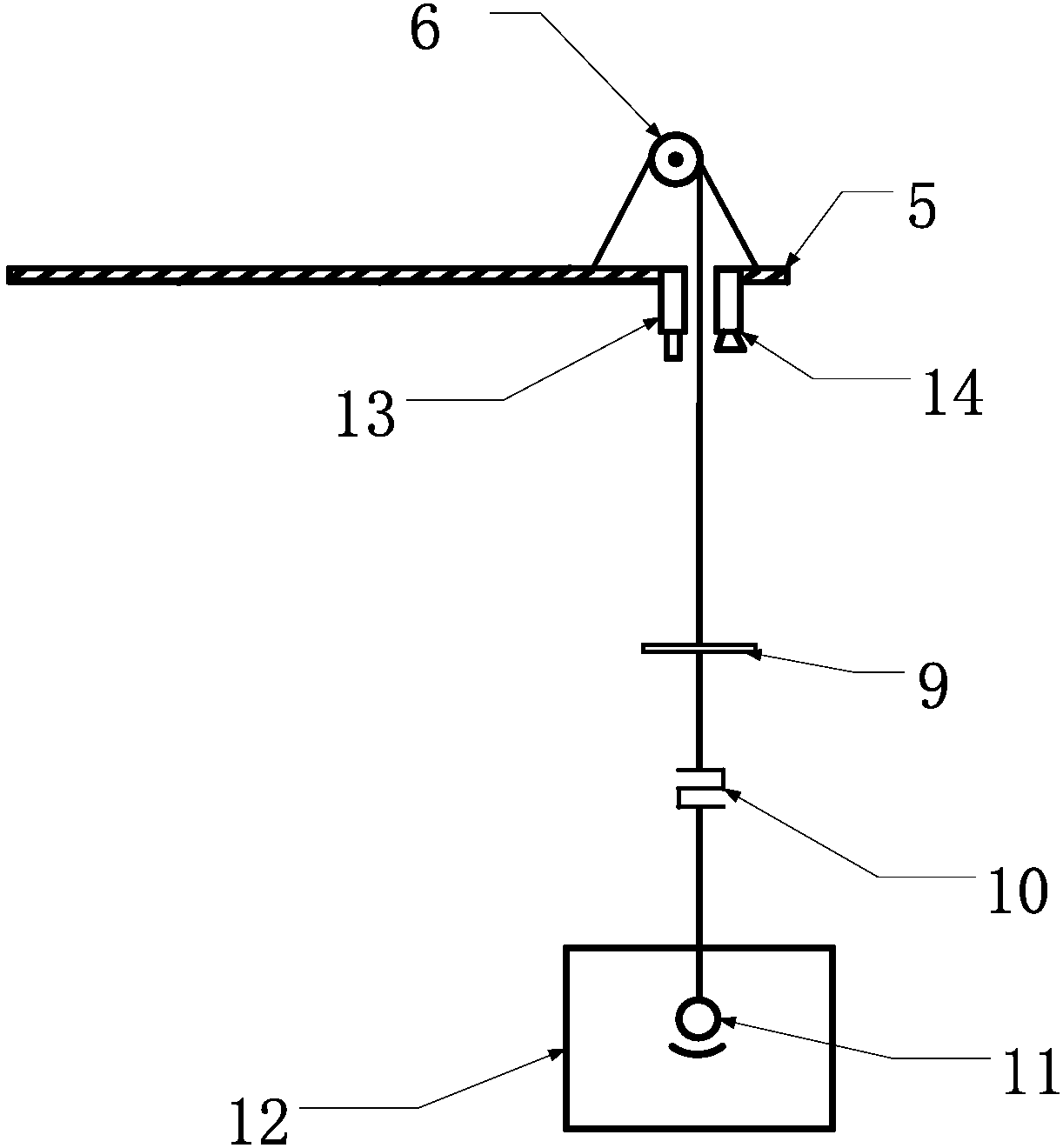
[0013] Specific implementation mode one: as Figure 1~2 As shown, the three-dimensional active suspension space vehicle microgravity simulation device of this embodiment includes a frame 1, an X-direction linear guide rail 4, an X-direction follow-up platform 5, a torque motor and a reel 6, an angle sensor 13, a laser ranging Sensor 14, sling hinge point 7, sling 8, plane mirror 9, tension sensor 10, ball bearing 11, two Y direction linear guide rails 2 and two Y direction follow-up platforms 3, the lower end of frame 1 is fixed on On the ground, two Y-direction linear guide rails 2 are horizontally and parallelly installed on the upper part of the frame 1, and each Y-direction linear guide rail 2 is provided with a Y-direction follow-up platform 3, and the two Y-direction follow-up platforms 3 are connected There is an X-direction linear guide rail 4, an X-direction follow-up platform 5 is arranged on the X-direction linear guide rail 4, a torque motor and a reel 6 are arrang...
specific Embodiment approach 2
[0016] Specific implementation mode two: as figure 1 and figure 2 As shown, the angle sensor 13 in this embodiment is a PSD angle sensor. With such a design, the optical circuit for measuring the spatial vertical angle of the sling 8 is formed with the plane reflector 9 installed in the vertical direction of the sling 8, so as to realize non-contact high-precision measurement of the spatial vertical angle of the sling. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0017] Specific implementation mode three: as figure 1 and figure 2 As shown, the X-direction servo platform 5 in this embodiment is a motor-driven servo platform. So designed to provide active tracking of the X-direction motion of the suspended spacecraft. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More