

Vibration suppression algorithm of spatial flexible mechanical arm
A flexible robotic arm and vibration suppression technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as uncertainty, large dynamic tracking error, and inability to suppress vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
[0092] In addition to the inertial characteristic effect of the rigid central body, the attitude dynamic equation of the central rigid body of the flexible manipulator in orbit also includes the effect of the flexible characteristics of each flexible manipulator on the coupling part. In addition, it also includes the effect of the vibration part of the flexible manipulator on the central rigid body. Accumulate the external moment part.
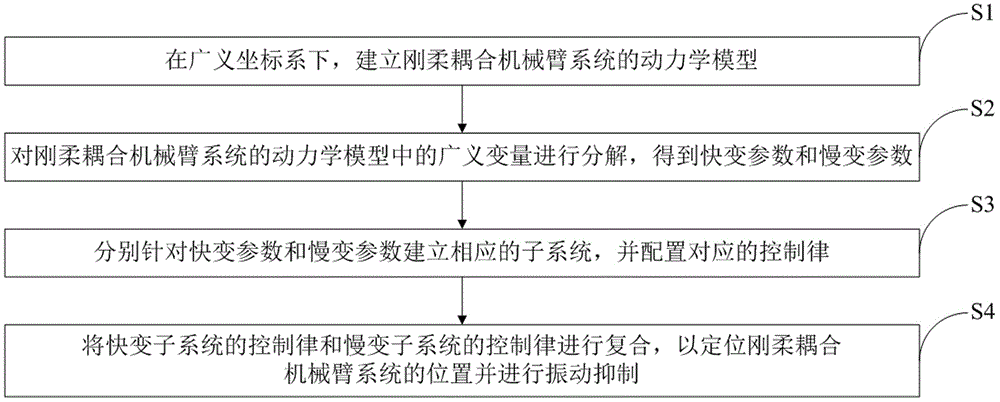
[0093] like figure 1 As shown, a space flexible manipulator vibration suppression algorithm is used in the rigid-flexible coupling manipulator system. The rigid-flexible coupling manipulator system includes a central body, a first flexible manipulator, and a second flexible manipulator connected in sequence and a rigid manipulator, the space flexible manipulator vibration suppre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More