

Spacecraft autonomous rendezvous control system ground simulation test method
A technology of ground simulation and test methods, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as large differences in real space processes and reduced credibility of ground simulation verification results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
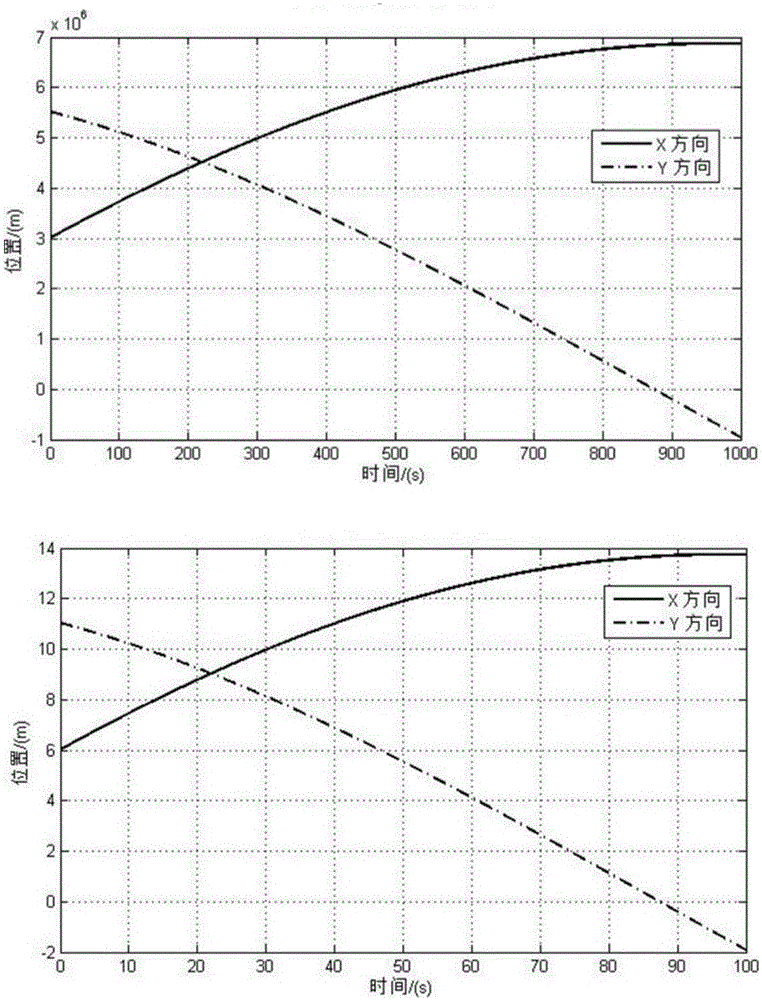
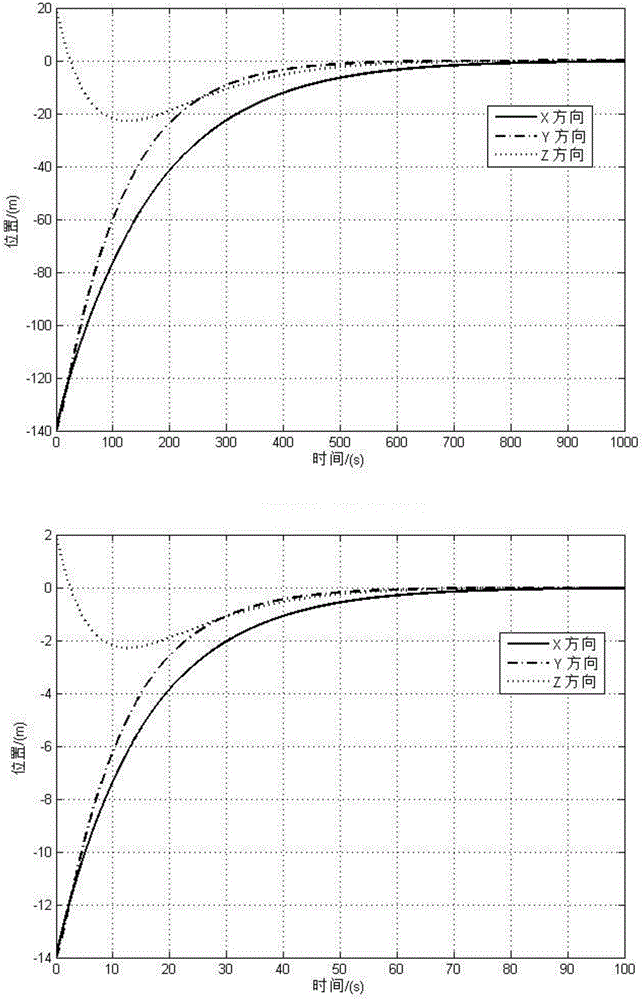
[0057] This embodiment intends to illustrate the running state of the ground simulator under the method proposed by the present invention through simulation.
[0058] The semi-major axis of the target spacecraft’s orbit a=6907900m, the orbital eccentricity e=0.1, the initial true perigee angle f 0 =0.5rad, the initial position X of the tracking spacecraft relative to the target spacecraft ct0 =-140m, Y ct0 =-140m, Z ct0 =20m, initial speed The side length of the ground test site is l=40m, and the ratio coefficient of the basic quantity is just like: lambda t = 1 / 10, which means that the target simulator movement distance scale is 1 / 500000 times of the target spacecraft, the ground simulator relative movement distance scale is 1 / 10 times of the space spacecraft relative movement, and the ground test time is the space real time 1 / 10 times of .
[0059] The spacecraft autonomous rendezvous controller takes the form of feedback linearization plus pole configuration:
[...
Embodiment 2
[0063] This example is intended to illustrate that under the simulation test method proposed by the present invention, the process of the omni-directional autonomous rendezvous mission can be verified.
example 2
[0064] In Example 2, the parameters of the verification object task, the parameters of the ground test system, and the similarity ratio coefficients of the corresponding physical quantities of the basic dimensions are the same as those in Example 1, and the reference trajectory of the spiral line is designed:
[0065] And design a feedback linearized tracking controller:
[0066] a x = kω 3 / 2 X c t - ω 2 X c t ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More