

Lower extremity exoskeleton recovery system and method based on human-machine cooperation
An exoskeleton and lower extremity technology, applied in the field of lower extremity exoskeleton rehabilitation system based on human-machine cooperation, can solve the problems of subject's autonomy being suppressed and participation enthusiasm, and achieve the effect of improving participation and computing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
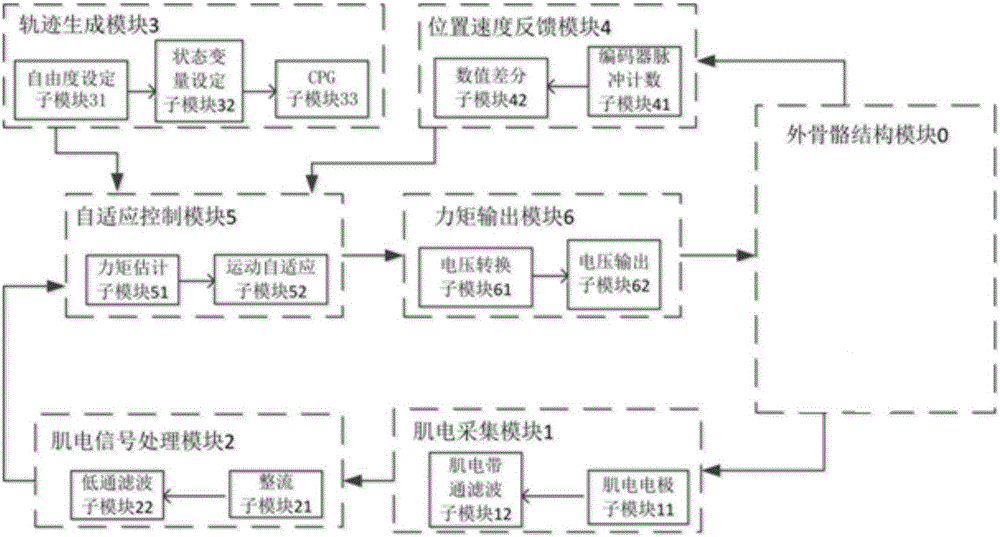
[0032] The lower extremity exoskeleton in the present invention has two degrees of freedom of the left and right lower limb hip joints and knee joints, and each joint is driven by an AC servo motor. According to the specific walking rehabilitation training task, the system sets the motion curve of each joint motor through the trajectory generation module 3 . After the subject puts on the exoskeleton rehabilitation system, the motion adaptive sub-module 52 in the adaptive control module 5 firstly c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More