

Planar three-degree-of-freedom sliding type loading robot with multi-unit linear driving function
A linear drive and linear drive technology, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problem of lack of overload protection and vibration absorption means, poor stability of the boom lifting mechanism, and power failure. Poor performance and other problems, to achieve the effect of numerical control of operations, strong overload protection performance, and reduced energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
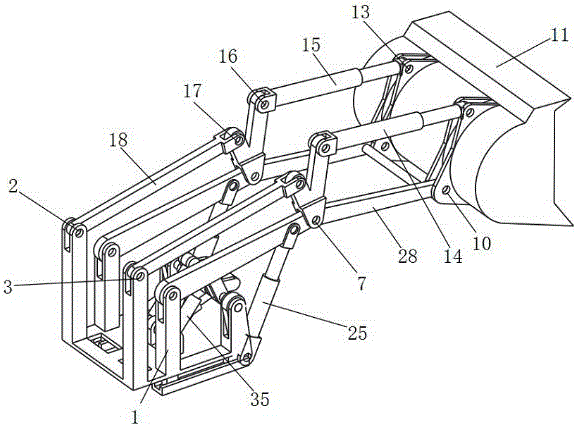
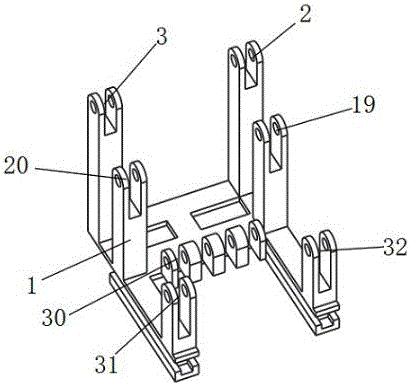
[0028] control figure 1 , a multi-unit linear drive planar three-degree-of-freedom sliding loading robot described in the present invention includes a boom lifting mechanism, a multi-unit linear drive mechanism, a bucket control mechanism, and a frame 1 .
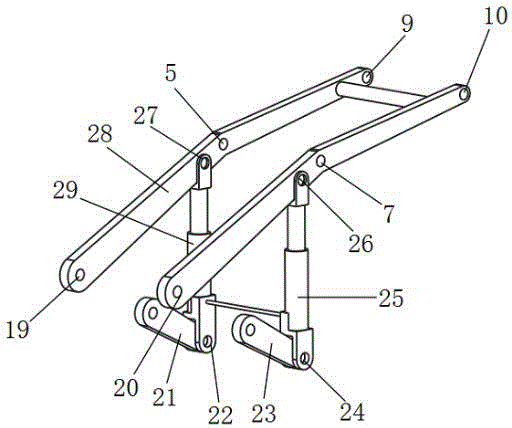
[0029] control figure 1 , figure 2 , image 3 , the boom lifting mechanism includes a first lifting branch chain, a second lifting branch chain, and a boom 28 . The first lifting branch chain includes a first connecting rod 23, a first hydraulic cylinder 25, one end of the first connecting rod 23 is fixedly connected to the crankshaft 36 through a key or other means, and the other end is connected to the first rotating pair 24 through the first rotating pair 24. Hydraulic cylinder 25 is connected at one end. The other end of the first hydraulic cylinder 25 is connected with the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More