

Exoskeleton gait analysis system and method based on multi-sensor fusion
An analysis system and exoskeleton technology, applied in sensors, devices to help people walk, medical science, etc., can solve the problems of limited application range, unfavorable analysis test, and complicated operation process, so as to improve the comfort of wearing and the efficiency of data collection , control responsive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings, but the protection scope of the present invention is not limited to the following.
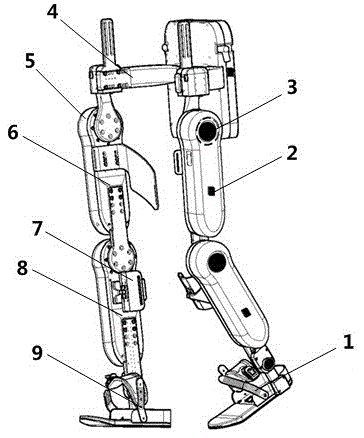
[0046] An exoskeleton gait analysis system based on multi-sensor fusion, which includes an exoskeleton, an attitude and navigation instrument, smart shoes, an encoder, and a microprocessor. The smart shoes are worn on the exoskeleton; the exoskeleton includes hip joint components , Thigh mechanical bones, knee joint components, calf mechanical bones and ankle joint components. Attitude and navigation instruments are installed at the hip joint components, thigh mechanical bones and calf mechanical bones to measure the three-axis direction of the exoskeleton during walking. Angle; encoders are set at the hip joint components, knee joint components and ankle joint components to measure the rotation angle of the hip joint, knee joint and ankle joint during the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More