

Industrial robot automatic pin hole assembling method based on visual guidance
An industrial robot, vision-guided technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as the inability to make corresponding adjustments due to changes in the environment, robot motion errors, and impact on jack results, etc., to improve work efficiency. And the effect of high quality, high precision and good real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
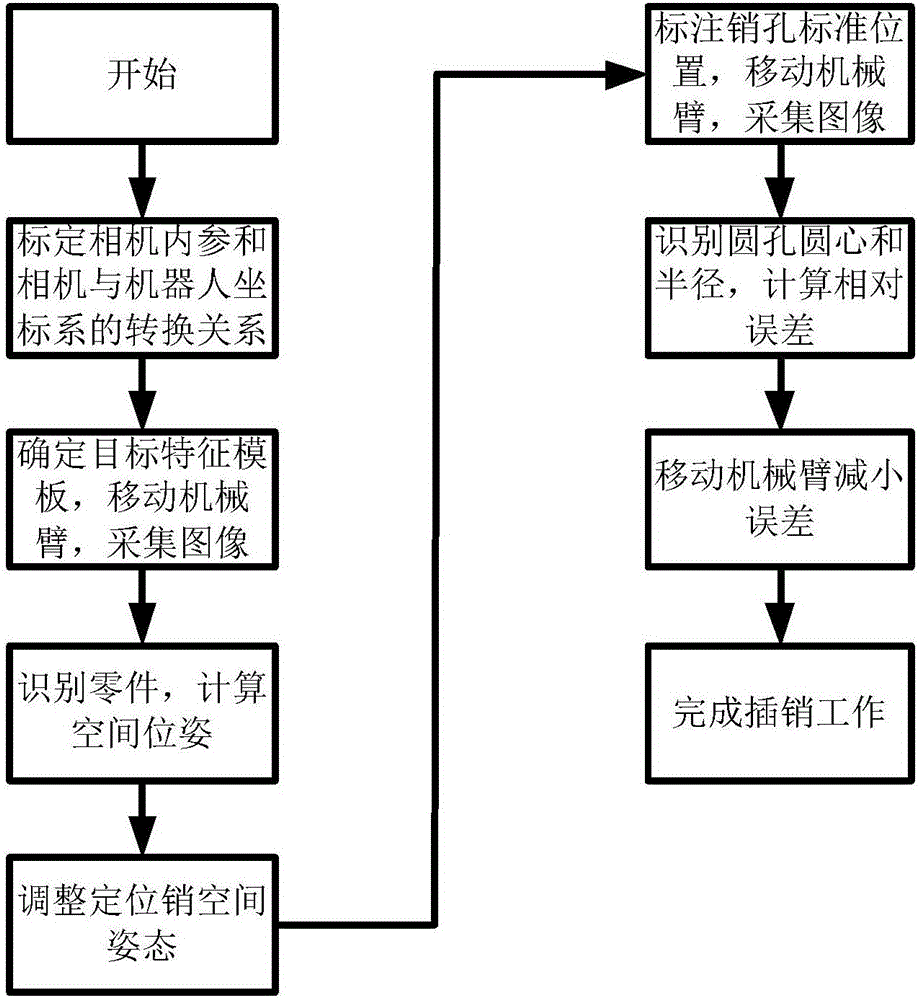
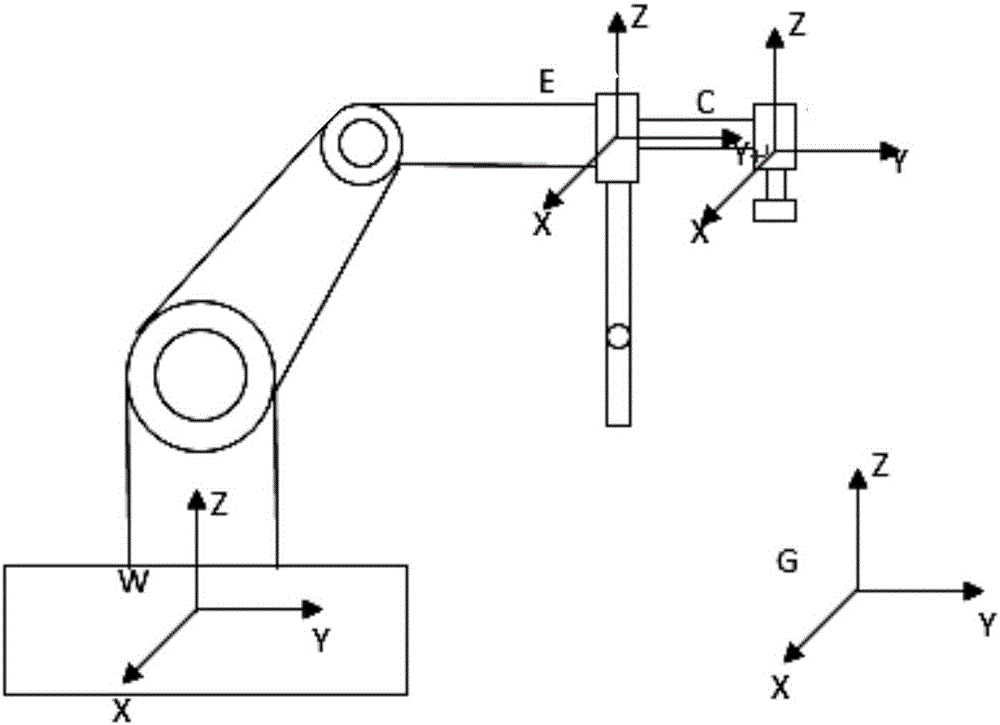
[0053] The invention relates to industrial automation control, and provides a visual feedback-based automatic positioning pin grasping and jacking operation method for errors generated in pin-hole assembly using a teaching method in current industrial control. The method specifically includes the following steps: Step 1, establish a system parameterized model and complete the calibration of the hand-eye camera; Step 2, determine the feature templates of positioning pins of different sizes; Step 3, search...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More