

Collision position sensing method based on six-dimensional force sensor
A six-dimensional force sensor and collision position technology, which is applied in the field of robot interaction, can solve the problems of slow sampling speed, low resolution, and high price, and achieve the effects of improving accuracy, accurate collision position information, and strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the examples.
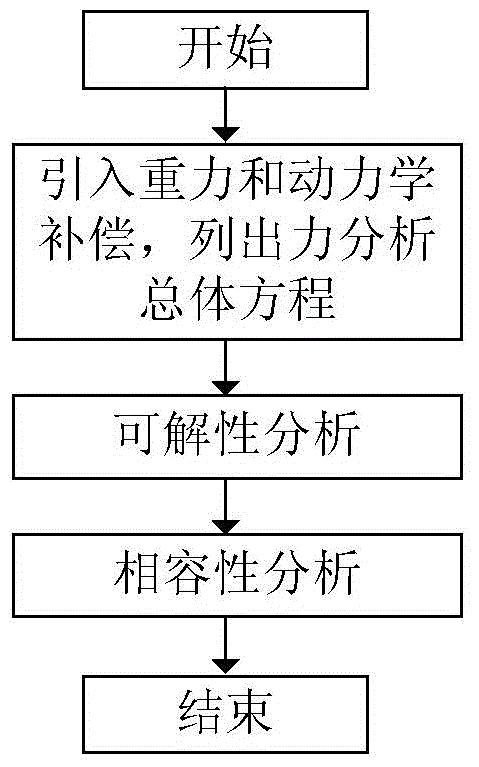
[0033] The present invention is a position sensing method based on a force and moment sensor for realizing the acquisition of the position information of the force point of a rigid mechanical arm during point contact. The six-dimensional force sensor calculates the position of the force-bearing point of the rigid manipulator when the point contacts. Such as figure 1 shown, including the following steps:
[0034] (1) Introduce gravity compensation and dynamic compensation, and list the overall equation of force analysis;
[0035] (2) Analyze the solvability of the algorithm by combining force analysis constraints, current constraints, normal vector constraints and manipulator contour constraints;
[0036] (3) According to the principle of compatibility, the phenomenon of no solution is eliminated, and the position of the force point is solved.
[0037] The gravity comp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More