

Model reference self-adaptive neural network-based three-axis inertial stabilization platform control method
A neural network control and neural network technology, applied in the field of high-precision control of aerial surveying and mapping stable platforms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
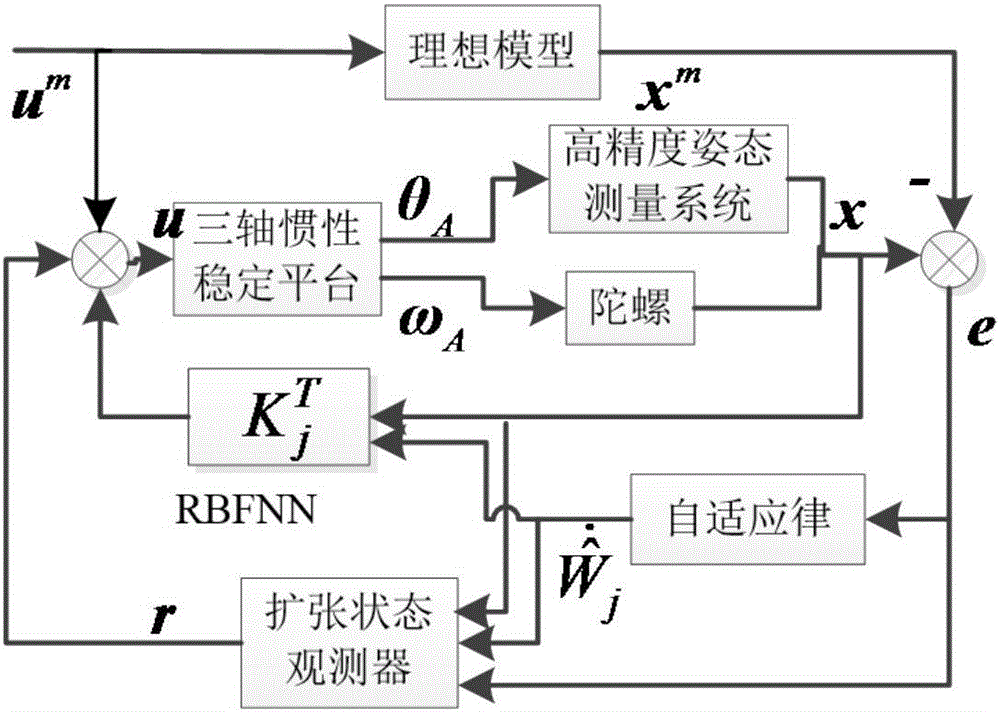
[0038] Such as figure 1 Shown, the concrete realization of the present invention is as follows
[0039] (1) Build a model-based reference adaptive neural network
[0040] Based on the Newton-Euler equation, the dynamic equation of the three-axis inertial stabilized platform is expressed as
[0041] x · = A x + B u + D ( g + d )
[0042] Among them, x=[θ j ω j ] T , H=0 3×3 , F=(f jk ),j,k=1,2,3,
[0043] u=[u 1 u 2 u 3 ] T , g=[g 1 g 2 g 3 ] T , d=[d 1 d 2 d 3 ] T ,
[0044]Among them, when j=1, it represents the roll frame, when j=2, the pitch frame, and when j=3, it represents the azimuth frame, is the state variable of the system, n=6 is the dimension of the state variable, θ j is the corresponding j-frame angle, ω j is the corresponding j-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More