

Scene depth measurement method, equipment and imaging device
A technology of scene depth and measurement method, which is applied in the direction of measuring device, optical device, image enhancement, etc., can solve the problems of slow acquisition of scene depth and complex image processing, and achieve the effect of fast and effective measurement and simplified image processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
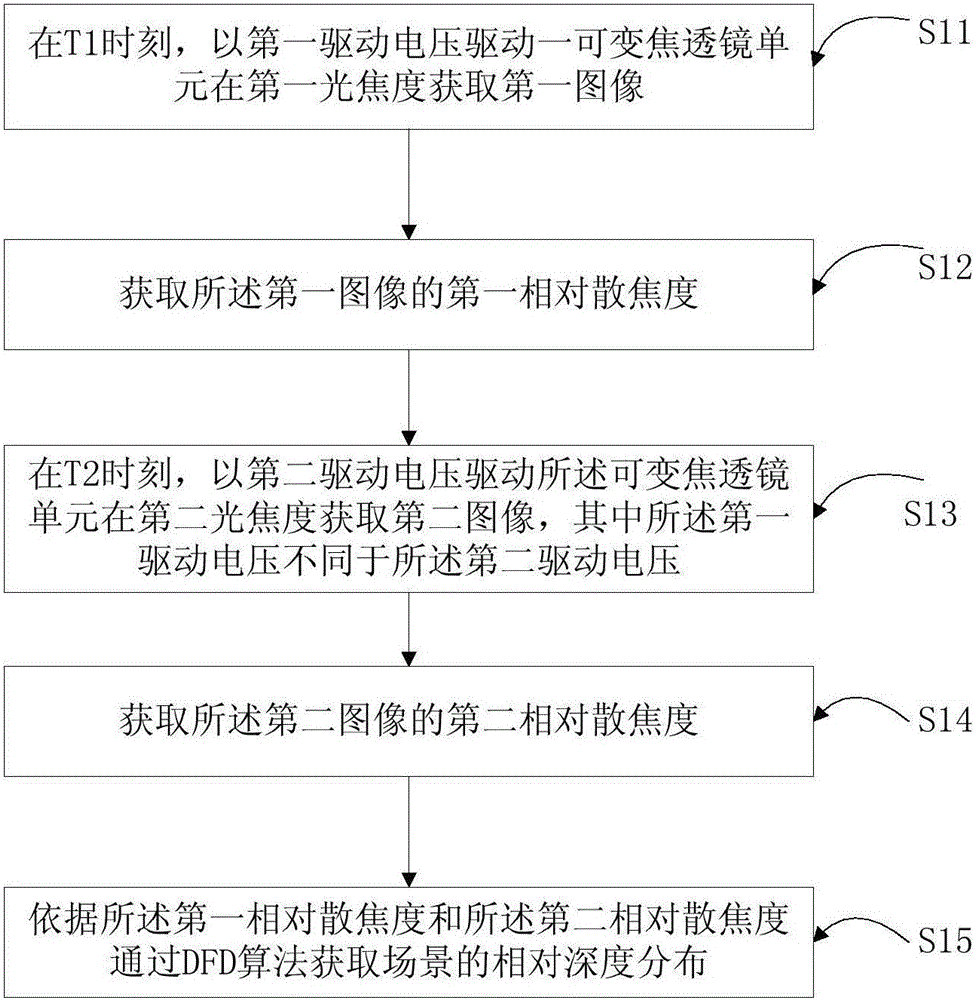
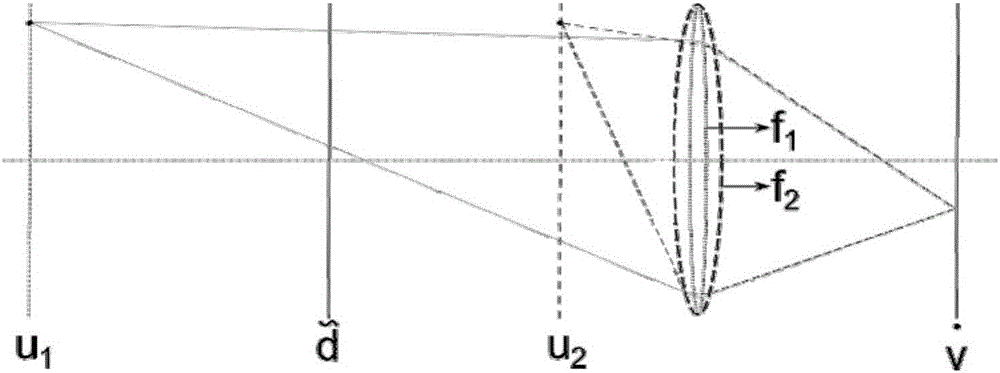
[0043] See figure 2 and image 3 , figure 2 It is a schematic flow chart of using the DFD algorithm in the scene depth measurement method in Embodiment 1 of the present invention, image 3 for figure 2 Schematic diagram of acquiring the relative depth of the scene by acquiring two images in . Such as figure 2 and image 3 As shown, when the scene depth measurement method of the present invention adopts the DFD algorithm, it mainly includes the following steps:
[0044] S11 at time T1, drive a variable focus lens unit with a first driving voltage to acquire a first image at a first optical power;
[0045] S12 Acquire the first relative defocus degree of the first image; the first relative defocus degree is also obtained through the circle of confusion formula.
[0046] S13 At time T2, drive the variable focus lens unit with a second driving voltage to acquire a second image at a second optical power, wherein the first driving voltage is different from the second drivin...
Embodiment 2
[0069] See Figure 4 and Figure 5 , Figure 4 It is a schematic flow diagram of the scene depth measurement method using the DFF algorithm in Embodiment 2 of the present invention, Figure 5 for Figure 4 Schematic diagram of the change relationship between the depth distribution of the focal plane in the center and the distribution of the focus value of the same target in the same scene. Such as Figure 4 and Figure 5 As shown, when the scene depth measurement method of the present invention adopts the DFF algorithm, it mainly includes the following steps:
[0070] S21 At multiple moments, control the variable focus lens unit to have different focal powers, and respectively collect images of the same target in the same scene at each moment;
[0071] S22 acquires the focus value of the image at each moment;
[0072] S23, according to the focus value of the image at each moment, fit the mapping relationship between the focus value distribution and the depth distributio...
Embodiment 3
[0081] See Figure 6 , Figure 6 It is a schematic structural diagram of a scene depth measurement device according to Embodiment 3 of the present invention. Such as Figure 6 As shown, Embodiment 3 of the present invention provides a scene depth measurement device, including:
[0082] A variable focus lens unit 10 for forming a gradient refractive index profile;
[0083] processing unit 20;
[0084] a memory 30 storing program instructions;
[0085] Wherein, the processing unit 20 is respectively connected to the memory 30 and the variable focus lens unit 10, and the processing unit 20 calls the program instructions stored in the memory 30 to realize the following functions:
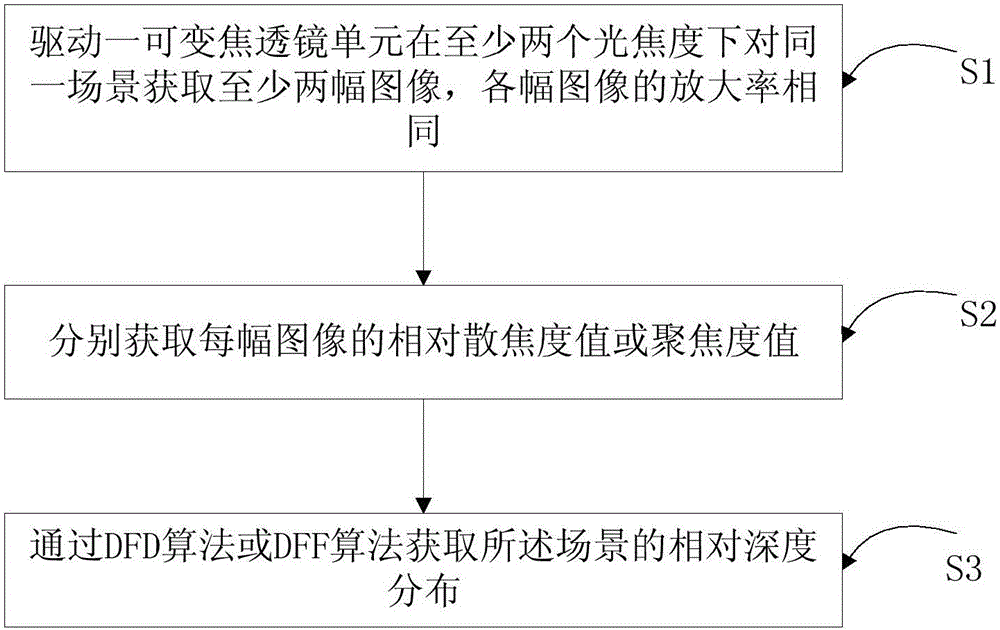
[0086] Drive a variable focus lens unit to obtain at least two images of the same scene under at least two focal powers, and the magnification ratio of each image is the same;
[0087] Obtain the relative defocus value or focus value of each image respectively;
[0088] The relative depth distrib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More