

Multi-freedom-degree hydraulically-driven mechanical hand used for carrying in workshops
A technology of degrees of freedom and manipulators, applied in the field of handling manipulators, can solve the problems of less working environment, limited degrees of freedom, poor grasping force and stability of manipulators, etc., and achieve the effect of wide application, excellent performance and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with embodiment and accompanying drawing, the present invention will be further described:
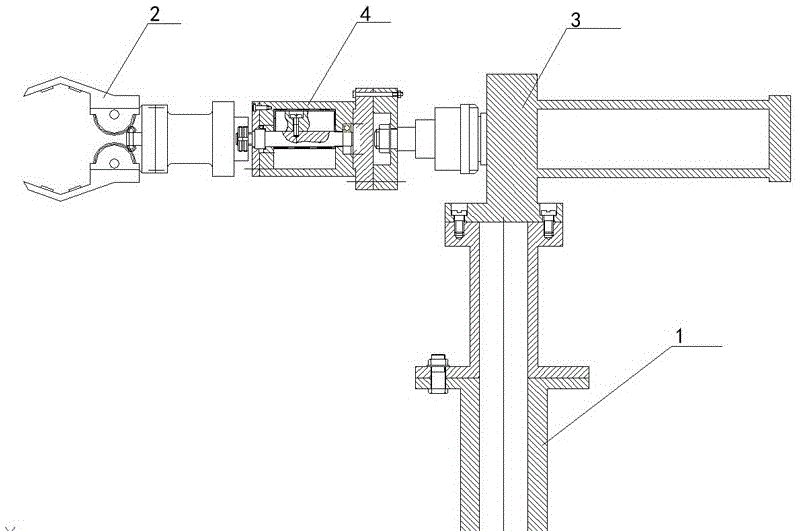
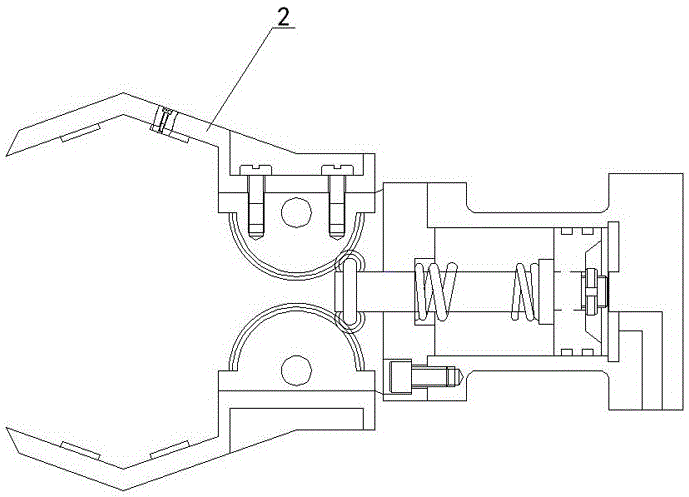
[0021] As shown in the figure: a multi-degree-of-freedom hydraulically driven manipulator for workshop handling, the manipulator is a cylindrical coordinate manipulator, and the manipulator has five degrees of freedom, wherein the first degree of freedom is grasping and closing, and the second degree of freedom is The hand turns, the third degree of freedom is arm stretching, the fourth degree of freedom is arm rotation, and the fifth degree of freedom is arm lifting; the manipulator includes a hand clamping mechanism, a wrist turning mechanism, a telescopic arm mechanism and a fuselage mechanism The fuselage mechanism includes a base, a rotary cylinder, a lifting cylinder and a rotary arm 1, the rotary cylinder is placed on the lifting cylinder, the rotary arm 1 is connected with the upper end cover of the rotary cylinder, and the moving plate of the rotary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More