

Three-magnetic-wheel giant steel pipe crawling type work platform
A work platform and magnetic wheel technology, applied in the direction of wheels, pipe components, pipes/pipe joints/pipes, etc., can solve the problems of great difficulty caused by precise workability, difficulty in controlling work quality, and one corner of the platform hanging in the air. Reliable performance, novelty and convenient control of crawling operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
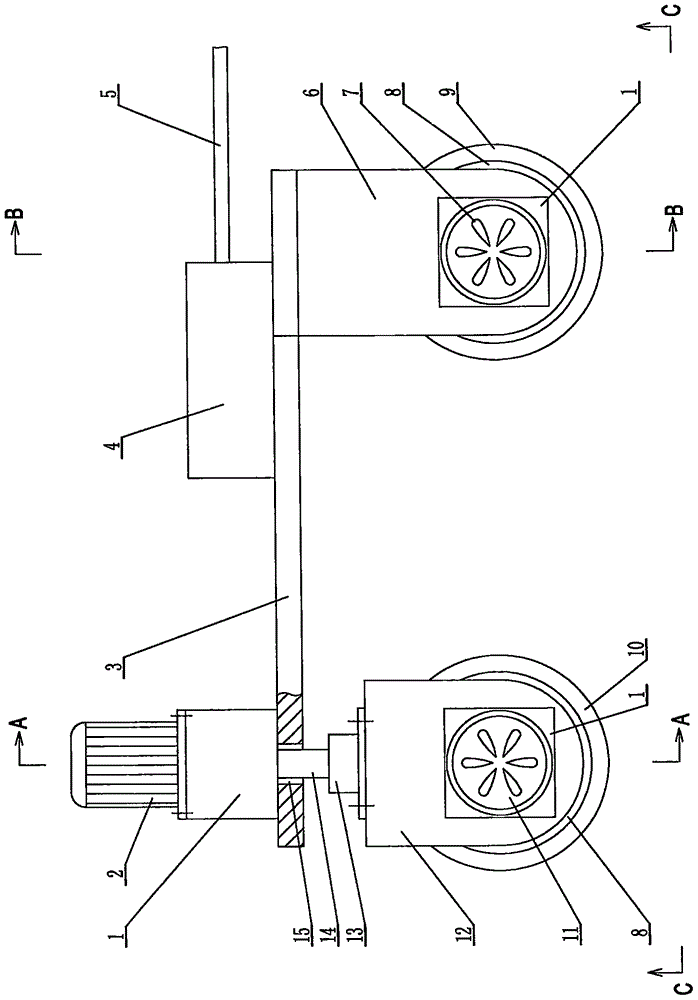
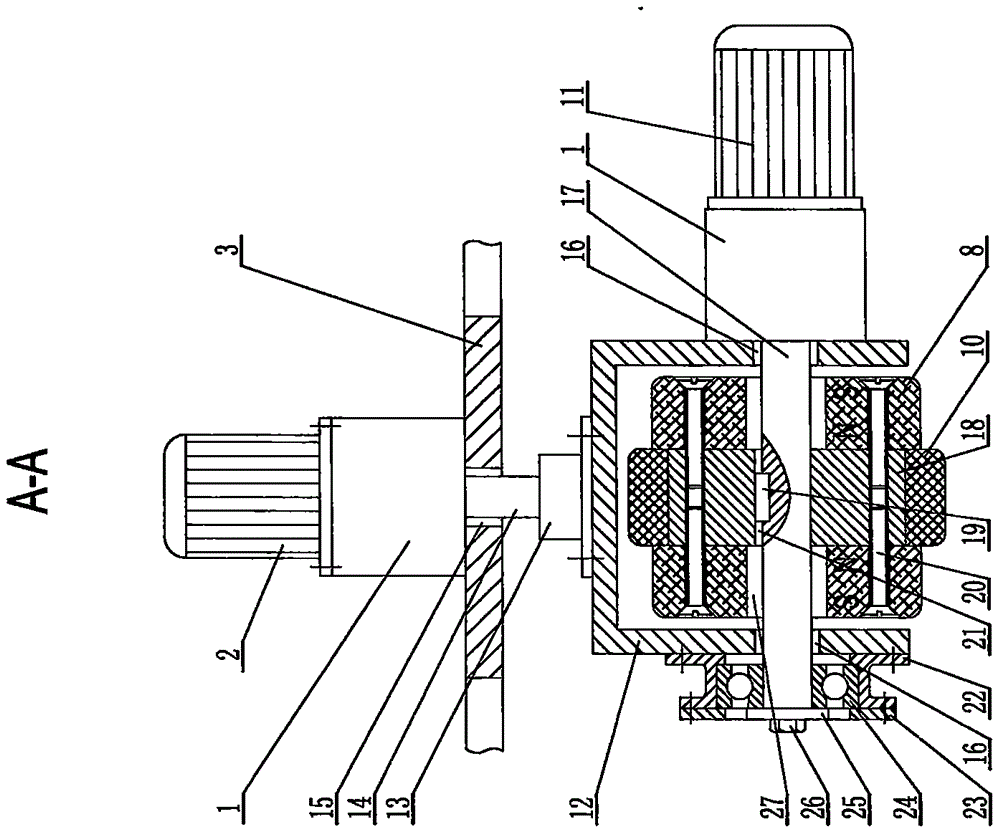
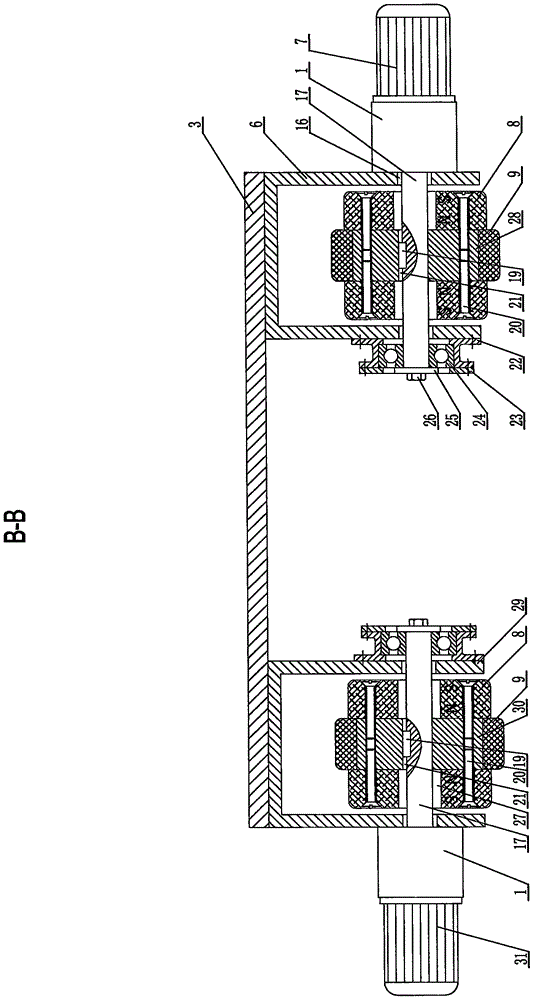
[0022] The left wheel support 29 and the right wheel support 6 are symmetrically fixed below the triangular platform 3 rears. The driving rubber wheel 9 is respectively enclosed within the outer diameter of the left wheel hub 30 and the right wheel hub 28 and fixed, and the magnetic wheel 8 with the magnetic wheel hole 27 is fixed symmetrically and concentrically on both sides of the left wheel hub 30 and the right wheel hub 28 with screws 20, and the belt One end of the drive shaft 17 with coupling key 19 passes through the bracket shaft hole 16 on the left side of the left wheel support 29, then passes through the magnetic wheel hole 27 on the magnetic wheel 8 and the shaft hole 21 on the left wheel hub 30, and then passes through the left wheel After the bracket shaft hole 16 on the right side of the bracket 29, it is fixed in the bearing 24; the drive shaft 17 rotates with the left wheel hub 30 through the connecting key 19, and the bearing 24 is fixed on the right side of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More