

Macro-micro integrated motion high-precision parallel mechanism device and control method
A technology that integrates motion and mechanism devices. It is used in program-controlled manipulators, manipulators, and manufacturing tools. It can solve problems such as difficult to achieve sub-micron positioning accuracy, eliminate rotary joint clearance, eliminate assembly errors and dimensional errors, and has a compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
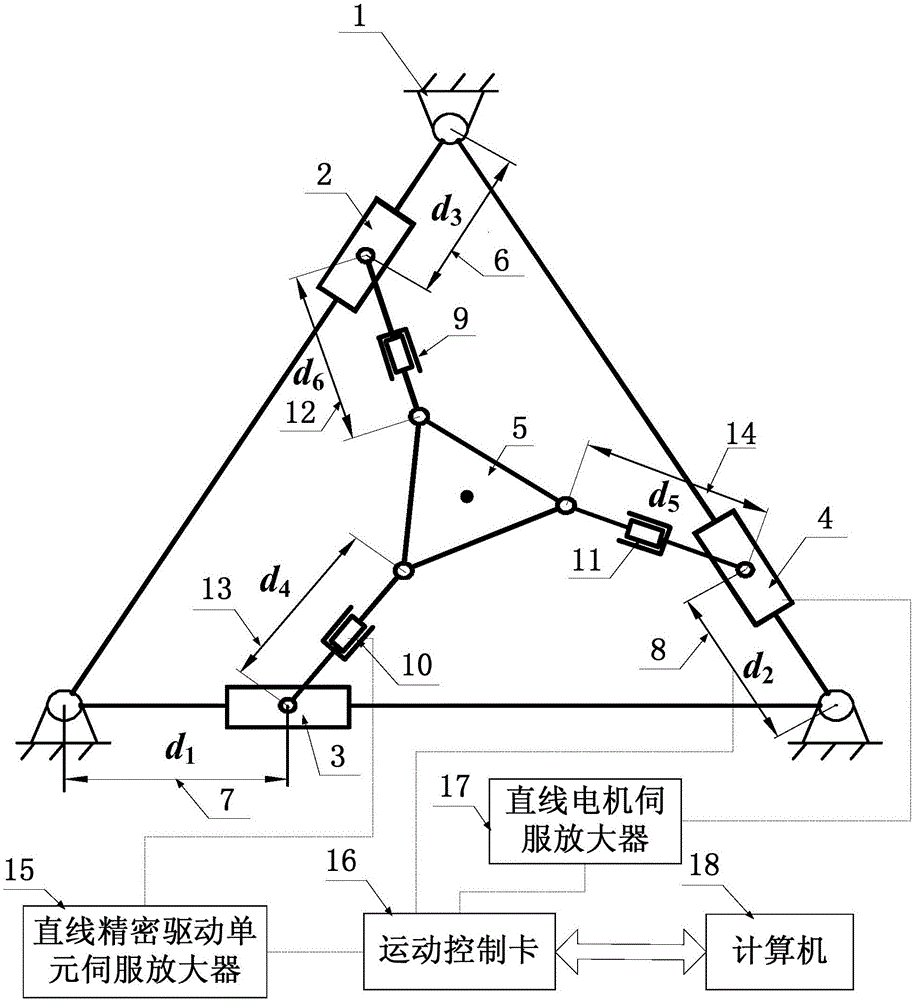
[0036] Such as figure 1 As shown, a macro-micro integrated motion high-precision parallel mechanism device includes a mechanical body part and a control part;
[0037] The mechanical body part includes a moving platform 5 and a static platform 1, and the shape of the static platform 1 is a triangle, and the three sides of the triangle are respectively equipped with linear motor-driven branch chains 2, 3, 4 with the same structure, symmetrically distributed, as figure 1 There are three linear motor-driven branch chains in total. The linear motor-driven branch chains are composed of guide rails, sliders and moving pairs formed by linear motors. The guide rails are fixed on the sides of the triangle and are used to adjust the macro motion of the moving platform. motion, the three sides of the static platform are respectively installed with linear grating displacement sensors 6, 7, and 8 for detecting the linear displacement of the slider movement, the measuring head of the linear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More