

Electric servo mechanism load simulation system and simulation method thereof
A technology of load simulation and electric servo, which is applied in the testing of machines/structural components, testing of mechanical components, measuring devices, etc., and can solve problems such as small torque, increased control difficulty, and low power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In the following description, for purposes of explanation, numerous specific details are set forth in order to provide a thorough understanding of one or more embodiments. It may be evident, however, that these embodiments may be practiced without these specific details. In other instances, well-known structures and devices are shown in block diagram form in order to facilitate describing one or more embodiments.
[0019] Various embodiments according to the present invention will be described in detail below with reference to the accompanying drawings.
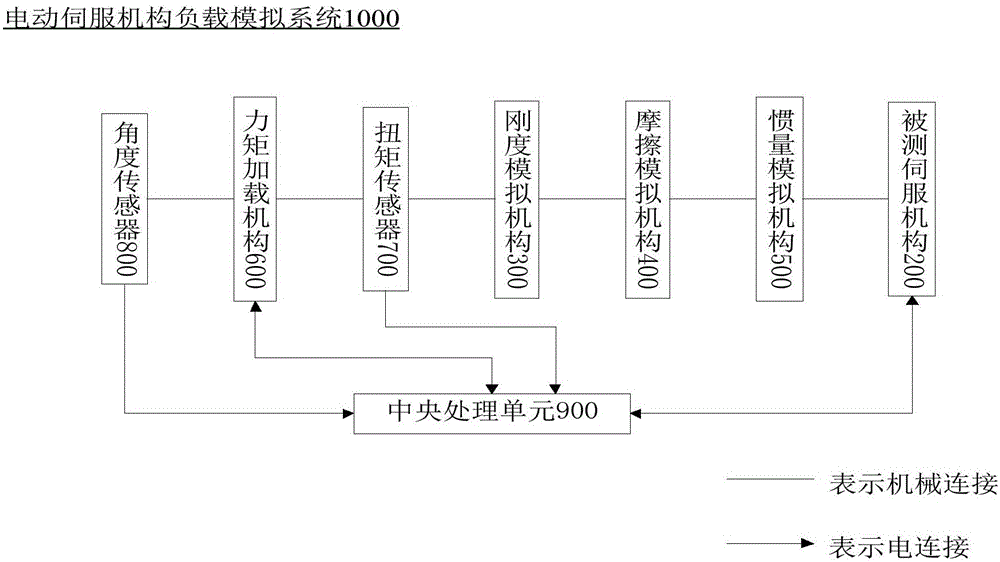
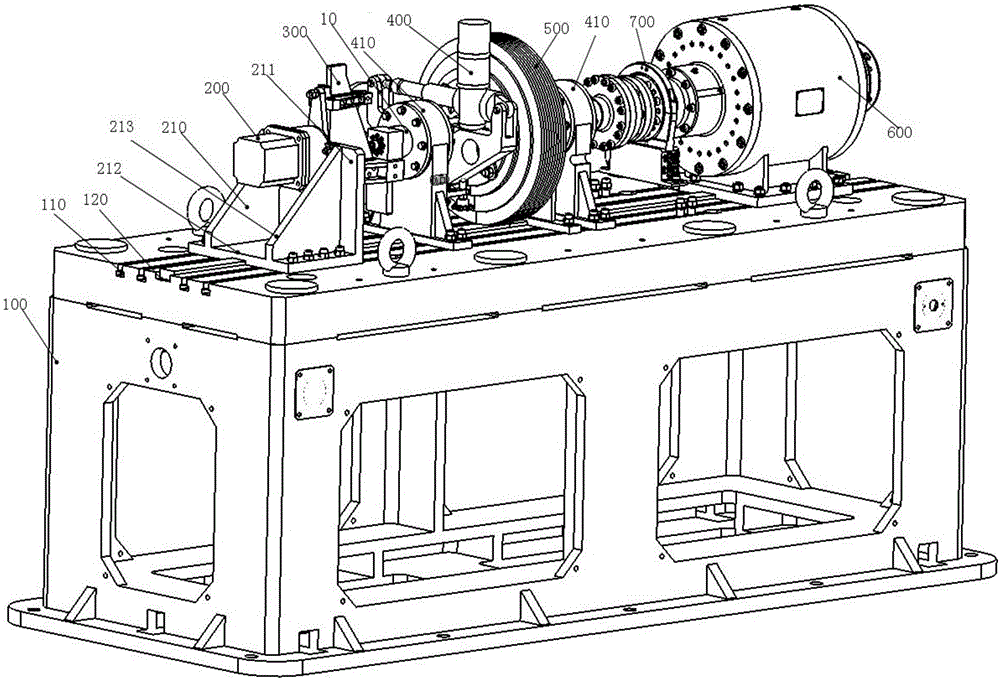
[0020] figure 1 It is a block diagram of the load simulation system of the electric servo mechanism in the present invention, figure 2 is a schematic diagram of the electric servo mechanism load simulation system of the present invention, as figure 1 and figure 2 As shown, the friction moment loading system 1000 includes:
[0021] A base 100, the table of the base 100 is provided with a T-shaped slot 110 and a c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More