

Robot motion planning method for searching to identify multi-objective tasks by facing man-machine collaboration
A motion planning, human-machine collaboration technology, applied in motor vehicles, instruments, transportation and packaging, etc., can solve the problems of indiscriminate processing and low efficiency, and achieve the effect of simple judgment method, improved efficiency, and reduced waiting time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below with reference to the accompanying drawings and examples.
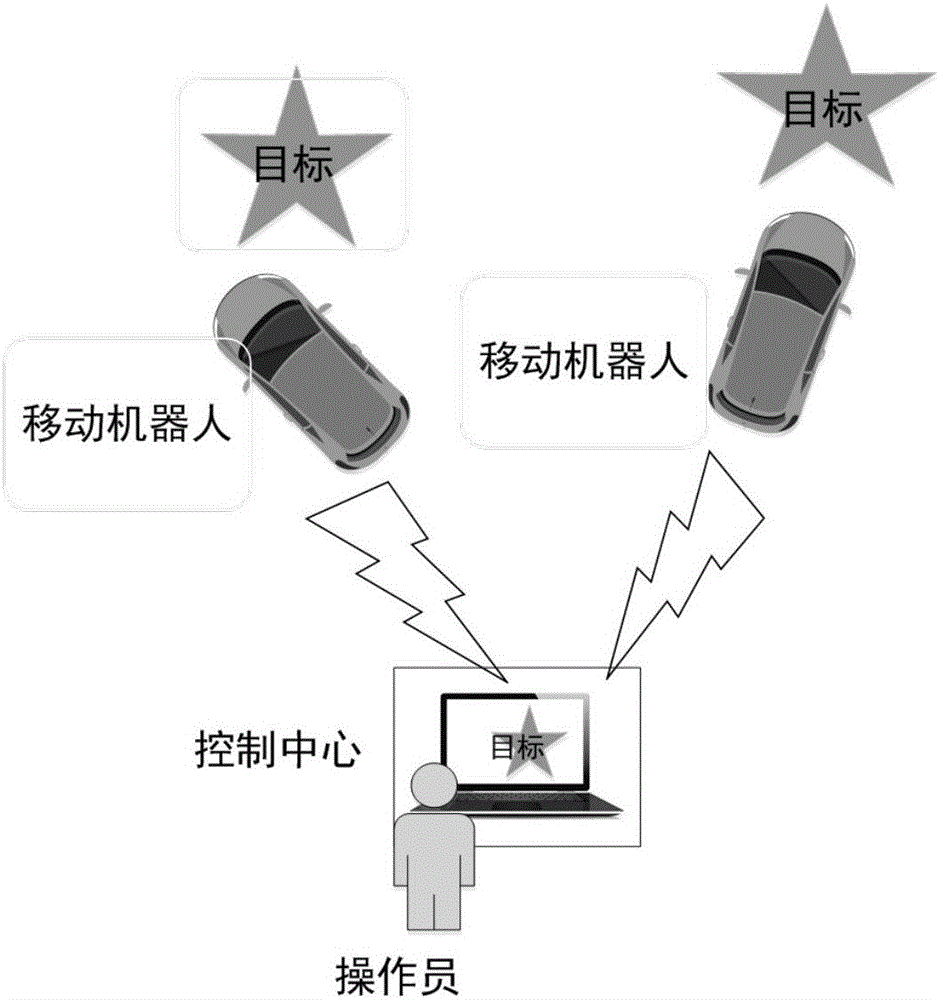
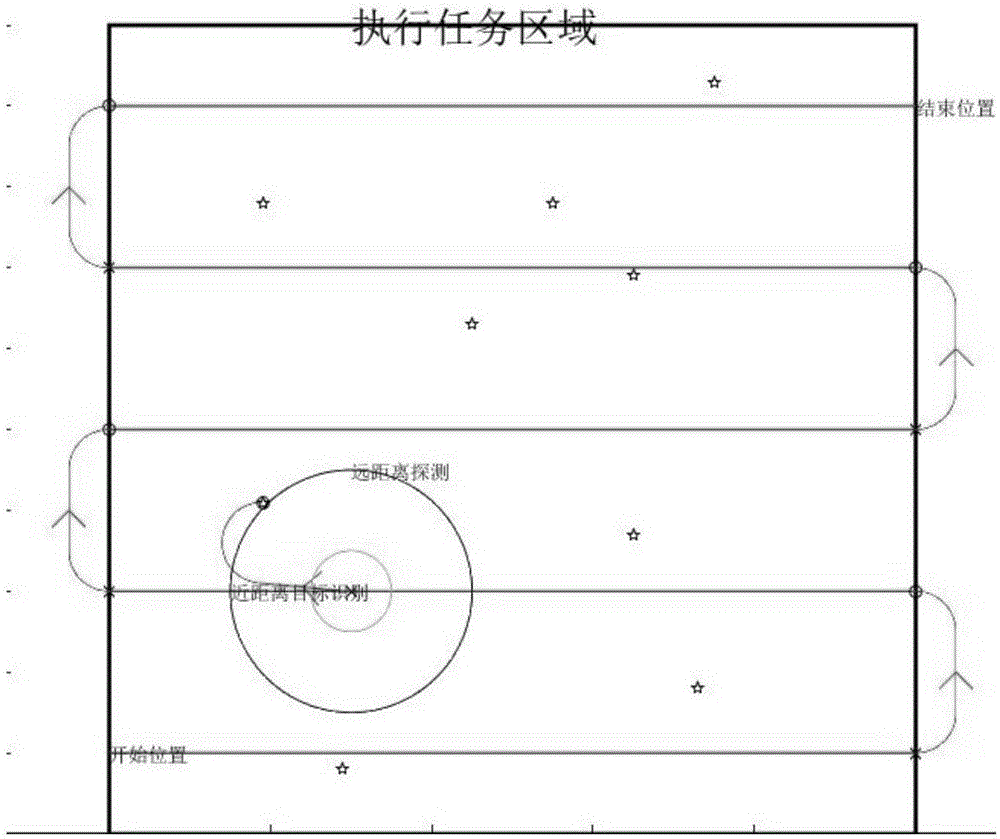
[0032] The invention provides a robot motion planning method for man-machine collaborative search and recognition multi-target tasks, the main idea of the method is:
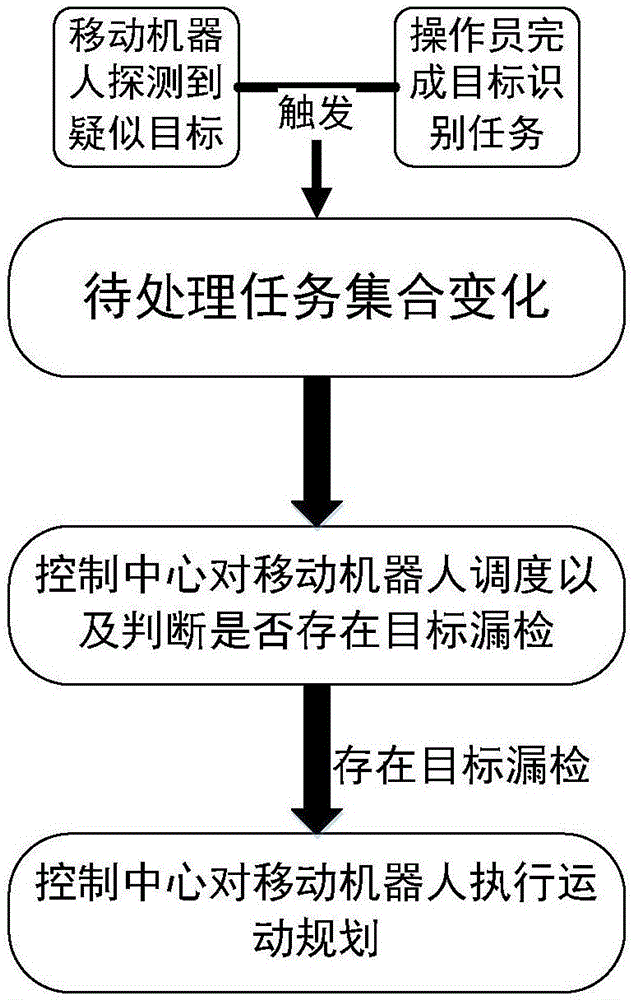
[0033] When the mobile robot detects a suspected target at a long distance, the recognition task of the suspected target is added to the pending task set; when the operator completes the target recognition task, the completed recognition task is deleted from the pending task set.
[0034]When the set of tasks to be processed changes, the control center judges whether the total amount of information collected by mobile robots reaching their respective suspected targets within the same time period (usually refers to the amount of information contained in the images collected by mobile robots at observation points) is greater than The maximum workload of the operator, if it is, it is consider...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More