

Double-dynamic quadratic-element internal robot
A two-dimensional, robotic technology, applied in the direction of manipulators, program-controlled manipulators, metal processing equipment, etc., can solve the problems of low production efficiency, large floor space, waste of resources, etc., to improve production efficiency, reduce equipment floor space, Avoid the effect of affecting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] In order to fully understand the technical content of the present invention, the technical solutions of the present invention will be further introduced and illustrated below in conjunction with specific examples, but not limited thereto.
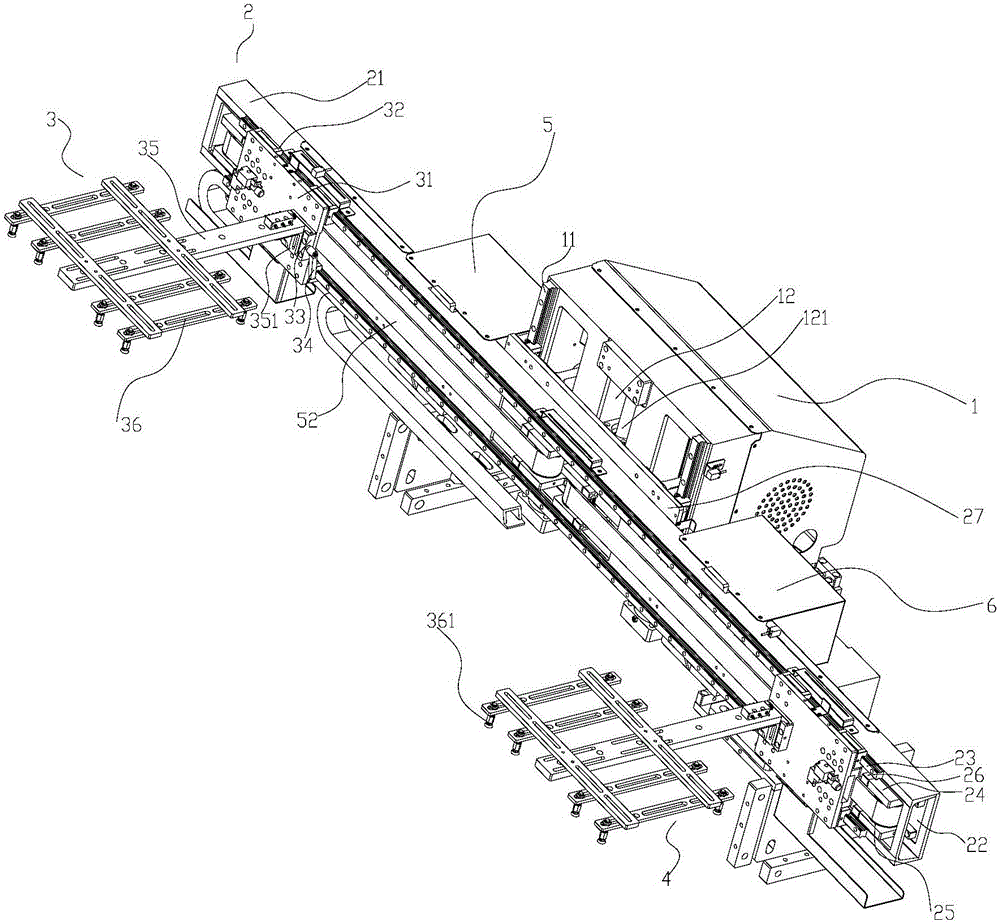
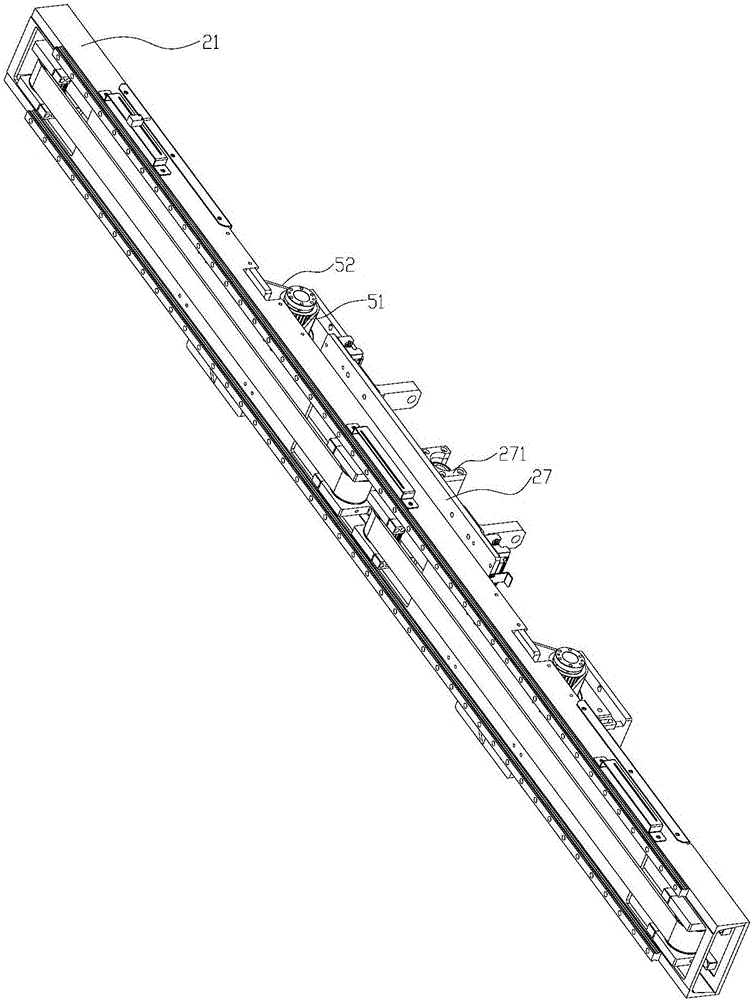
[0038] like figure 1 , Figure 4 , Figure 5 In the specific embodiment shown, the dual-power type dual-power type secondary element in-mold robot designed by the present invention is installed in the stamping equipment 8, only the manipulator extends out of the stamping equipment 8, and the dual-power type dual-power type secondary element in-mold robot The robot includes a machine base 1 and a mechanical arm 2 movably connected to the machine base 1. The machine base 1 is provided with a vertical drive assembly 12 for driving the vertical movement of the mechanical arm 2, and the mechanical arm 2 is fixed with a first horizontal drive assembly. 5 and the second horizontal drive assembly 6, and the first manipulator 3 and the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More