

Robot five-finger dexterous hand executive device
The technology of an actuator and a dexterous hand is applied in the field of the five-finger dexterous hand actuator of a robot, which can solve the problems of increasing the complexity of the system and the difficulty of research, and achieves low grasping control difficulty, reduced complexity and research difficulty, and high reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Preferred embodiments of the present invention are described in detail as follows:
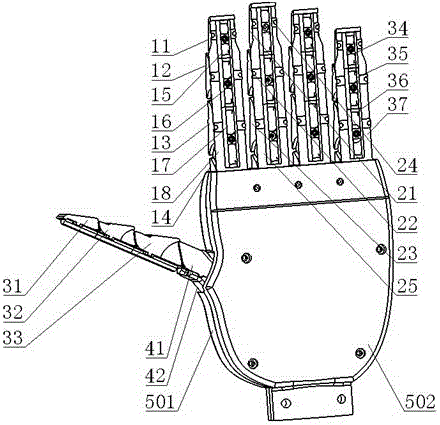
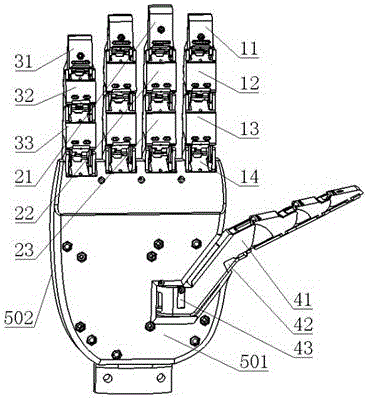
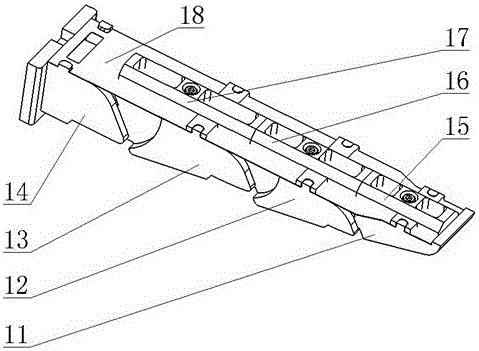
[0033] In this example, see Figure 1-13, a five-finger dexterous hand actuator for a robot, including a palm unit and five fingers, the palm unit includes the back of the palm 501 and the center of the palm 502, one of the fingers is a thumb, and five miniature direct current drives are set inside the palm unit to drive the finger bending action Motor 509 and a miniature DC motor 509 that swings the thumb, the output shaft of the miniature DC motor 509 is fixedly connected with the sensor 508 and the winding 505 is fixedly installed, and the two index fingers have the first finger unit part, and the first finger unit consists of the first finger unit in turn. Knuckle A11, second knuckle A12, third knuckle A13 and fourth knuckle 14 are connected, and a rotation axis is set between two adjacent knuckles, so that the first finger unit forms a finger joint system with three degrees of free...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More