

Binocular stereoscopic vision-based stereo matching method
A binocular stereo vision and stereo matching technology, which is applied in the field of computer vision, can solve the problems of increasing the difficulty of stereo matching, discontinuous parallax, and prone to wrong matching, so as to solve the problem of parallax calculation in areas where the parallax is discontinuous and cannot be matched. , the effect of mitigating weak and repetitive textures, improving quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
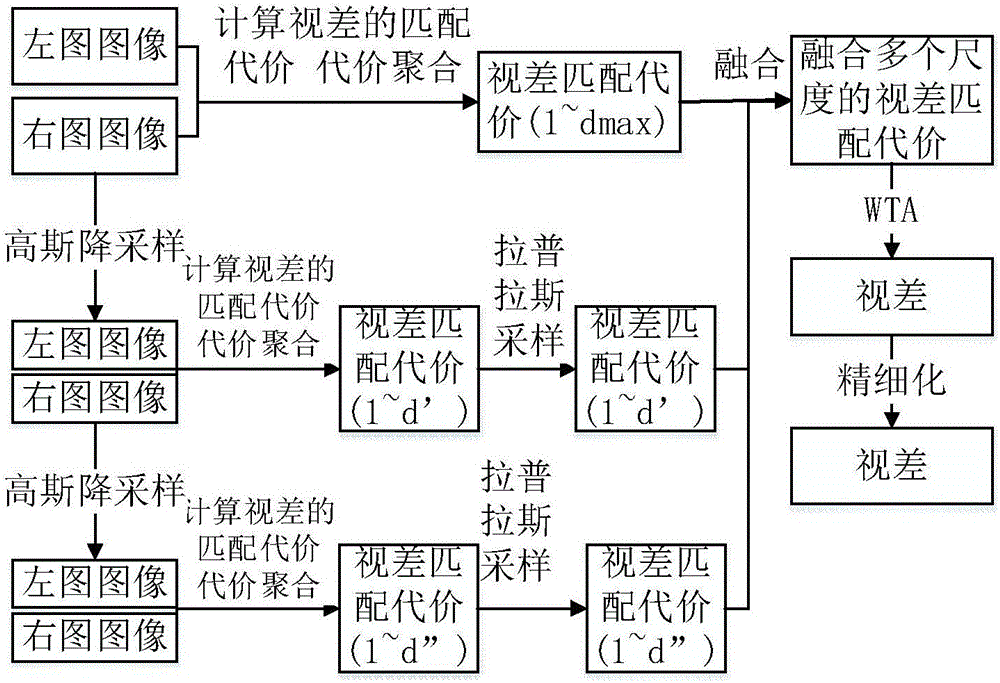
[0041] Below in conjunction with the accompanying drawings and the stereo matching process of Gaussian pyramid transformation cross-scale cost aggregation, the present invention will be further elaborated by examples:
[0042] 1. Calculate the matching cost
[0043] The matching cost is used to measure the similarity between two or more different images of the same scene taken from different perspectives and corresponding pixel pairs under different disparities. Matching cost calculation using f:R W×H×3 × R W×H×3 →R W×H×L Indicates that W and H represent the width and height of the image resolution, 3 represents the RGB channel of the pixel, and L represents the maximum parallax d max . Two different stereo image pairs I and I′ of the same scene taken from different perspectives use formula (1) to represent the matching cost volume from 1 to L in parallax.
[0044] C=f(I,I') (1)
[0045] for x i ,y i The pixel point at the coordinate i=f(x i ,y i ), the matching cost...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More