

Indoor localization system for mobile robot and calculation method thereof
A mobile robot, indoor positioning technology, applied in the direction of navigation calculation tools, instruments, measuring devices, etc., can solve the problems of other signal interference, high energy consumption of the locator, affecting the accuracy and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
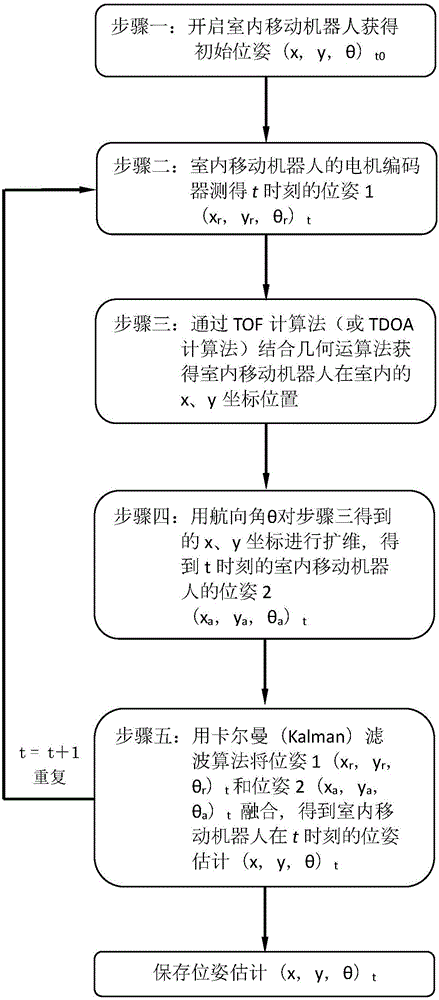
[0067] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the following embodiments will specifically elaborate the mobile robot indoor positioning system based on ultra-wideband (UWB) technology and its positioning calculation method in conjunction with the accompanying drawings. .
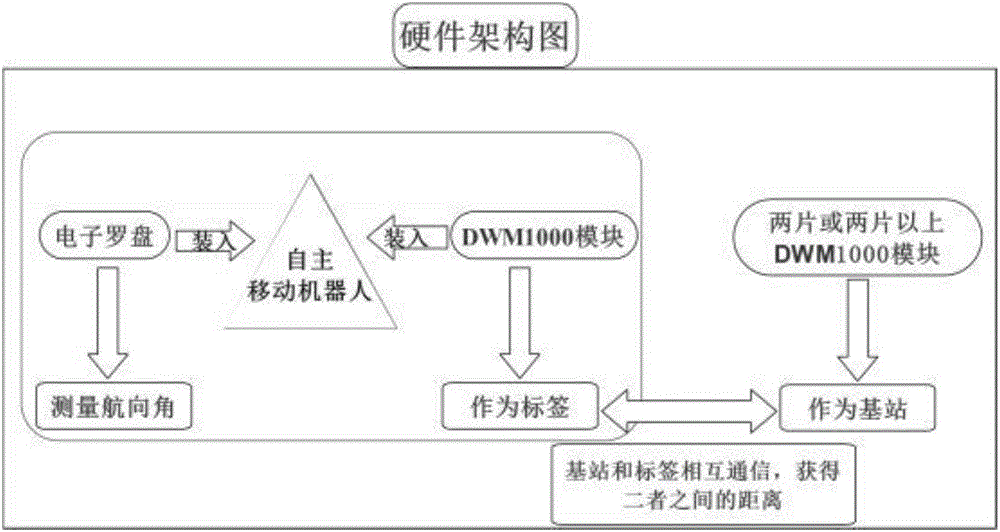
[0068] figure 1 It is a hardware architecture diagram of an indoor mobile robot according to an embodiment of the present invention.
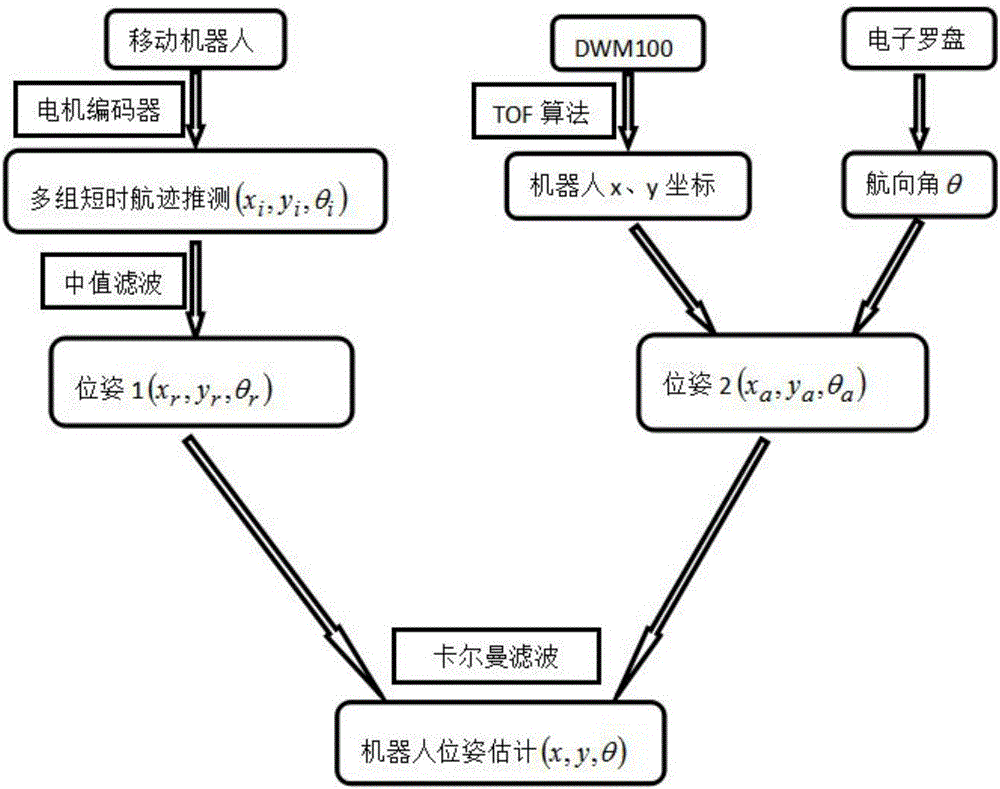
[0069] Such as figure 1 As shown, the indoor positioning system of this embodiment uses a mobile robot with three omnidirectional wheels, and its main controller is myRIO produced by National Instruments (National Instruments, Inc., NI for short). Others include an electronic compass (heading angle sensor) and a DWM 1000 module installed on the mobile robot. In addition, there are two DWM1000 modules placed in the active space of the mobile robot of this embodiment.
[0070] A DWM100...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More