

Movement imagery brain-computer interface-based hand function rehabilitation method
A technology of motor imagery and rehabilitation methods, applied in the input/output of user/computer interaction, computer components, mechanical mode conversion, etc., can solve the problems of lack of interesting patient active participation, family and social burden, and large manpower. Achieve the effect of improving training enthusiasm and fun, conducive to remodeling, and high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
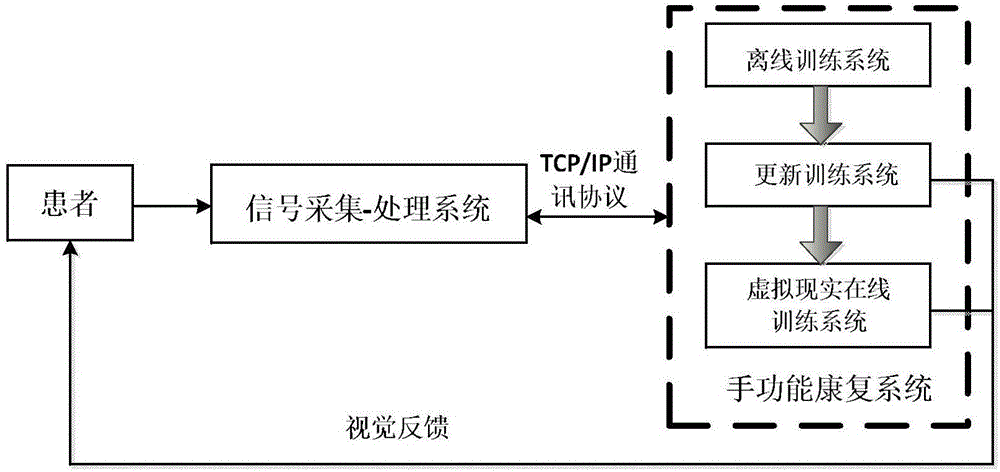
[0030] see figure 1 , the hand function rehabilitation method based on motor imagery brain-computer interface, including the following steps:
[0031] (1) Offline training: The patient performs offline training. After the training, the EEG signals collected during the motor imagery period of the left and right hands of the patient are established for the first recognition model and provided for update training;
[0032] (2) Update training: The patient performs update training, analyzes the EEG signals during the motor imagination of the patient's left and right hands according to the first recognition model, presents the hand movement video, and feeds back to the patient to generate more recognizable EEG signals. After the training, the collected Create an updated recognition model based on the EEG signal and provide it for virtual reality online training;
[0033] (3) Virtual reality online training: the patient imagines the movement of the left and right hands, analyzes th...
Embodiment 2
[0035] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0036] see image 3 , the single training process of offline training in step (1) is as follows:
[0037] (1-1) A black screen appears for 2s, prompting the patient to rest;
[0038] (1-2) 2s random left or right hand action video presentation, prompting patients to get ready and guiding motor imagery actions;
[0039] (1-3) Arrows in the same direction as the left and right hands in the video are presented in 4s. The left arrow represents the motor imagination of the left hand, and the right arrow represents the motor imagination of the right hand. The patient performs the corresponding motor imagination task according to the arrow prompts.
[0040] see Figure 4 , the single training process of the update training in the step (2) is as follows:
[0041] (2-1) 2s black appears, prompting the patient to rest;
[0042] (2-2) Random left / right arrow present...
Embodiment 3
[0044] Embodiment three: this embodiment is basically the same as embodiment two, and the special features are as follows:
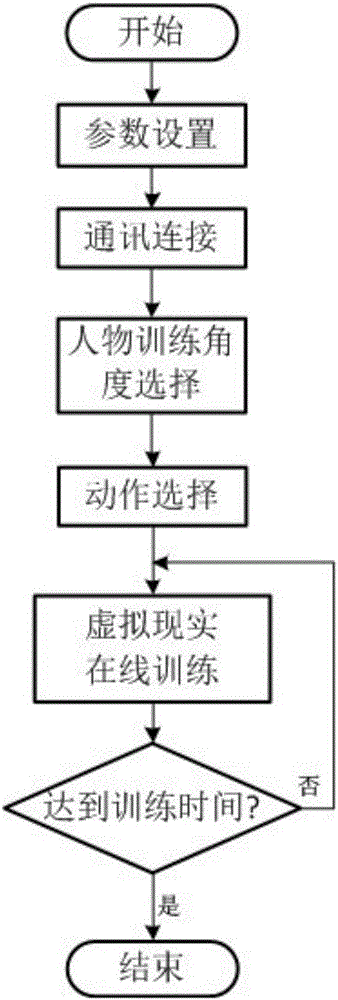
[0045] see Figure 5 , the interface diagram of hand function rehabilitation method based on motor imagery brain-computer interface, including offline training interface diagram (1), update training interface diagram (2), virtual reality online training interface diagram (3), the specific operation steps are as follows:
[0046] see Figure 6 , the specific operation steps of offline training are as follows:
[0047] 1) Parameter setting: set the IP address, port number and training time of the TCP / IP protocol in interface (1);
[0048] 2) Communication connection: click the "Start Monitoring" button, and the offline training subsystem will monitor the connection of the signal acquisition-processing system;
[0049] 3) Offline training: Click the "Start Timing" button to start offline training, and control the acquisition of EEG signals by the signal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More