

Simplified unmanned aerial vehicle multi-target location method
A multi-target positioning and unmanned aerial vehicle technology, applied in the field of photoelectric imaging measurement, can solve the problems of difficult real-time or quasi-real-time positioning of multiple targets, long time consumption, poor real-time performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below with reference to the accompanying drawings and examples.
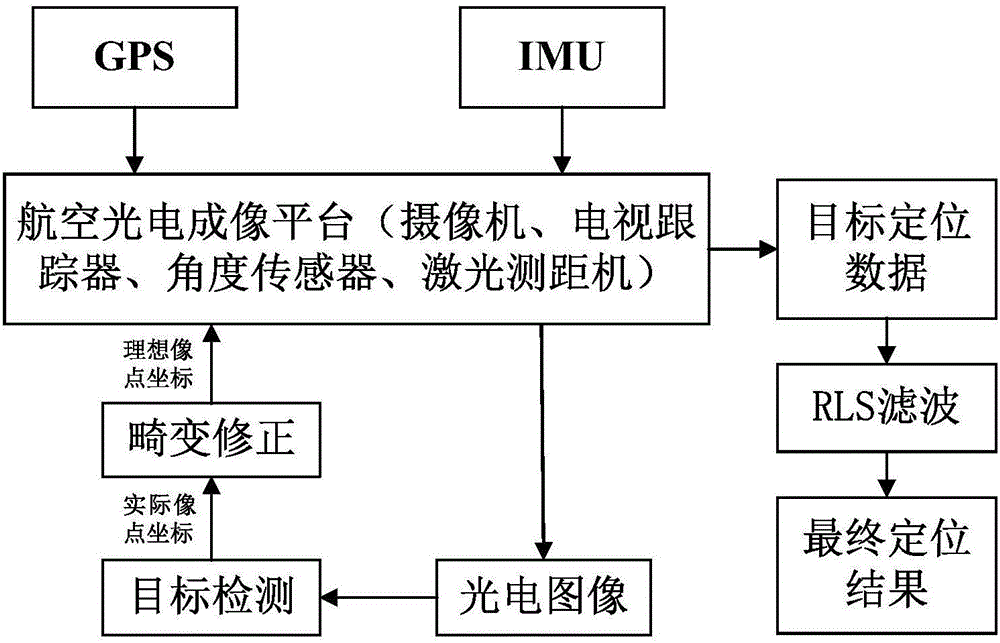
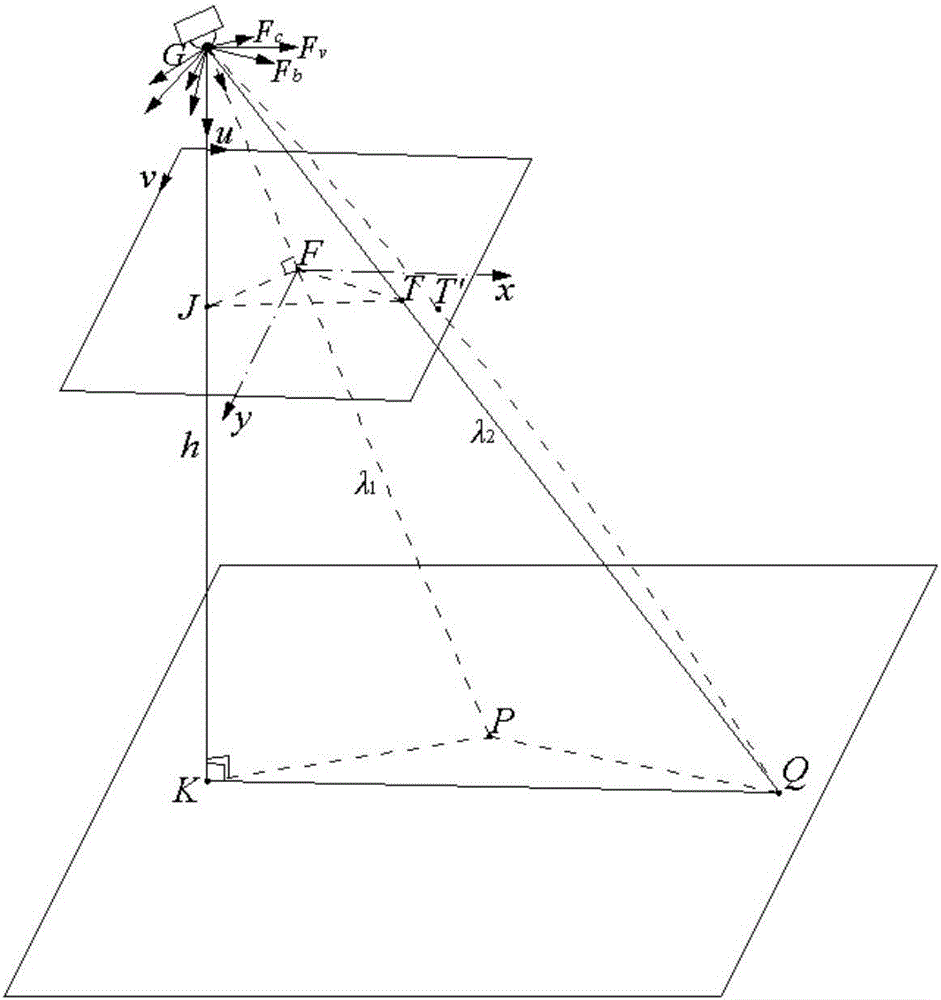
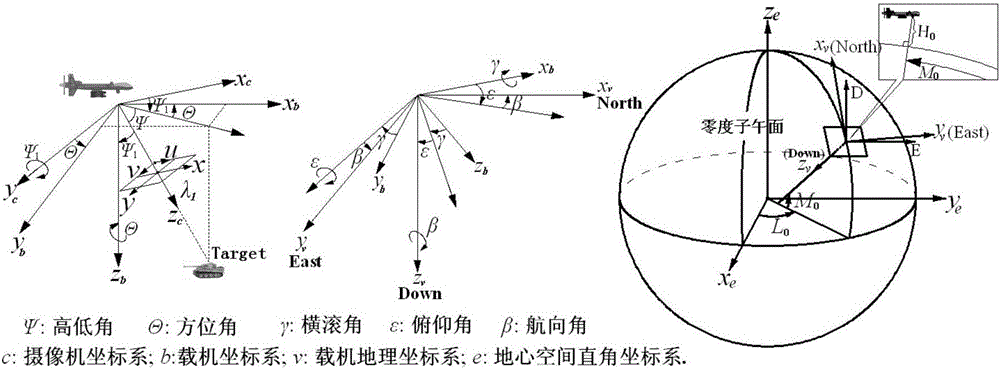
[0037] The invention provides a simplified UAV multi-target positioning method. By establishing a rigorous positioning geometric model, the distance and angle relationship between the target and the UAV photoelectric platform is calculated, and the single-frame image multi-target is realized through coordinate transformation. In order to solve the technical problems of complex hardware equipment, poor real-time performance and reliability caused by the existing multi-target positioning method based on the UAV multi-sensor platform.
[0038] The present invention is mainly aimed at the optoelectronic platform carried by small and medium-sized UAVs. It adopts a single-array CCD sensor to image the ground, and implements mid- and low-altitude flight reconnaissance. The ground coverage range of a single image is 1-2km, and in most cases there will not be too m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More