

Wheel-type moving robot obstacle-avoiding control system based on multi-sensor information fusion
A mobile robot, wheeled robot technology, applied in the control/regulation system, non-electric variable control, two-dimensional position/channel control and other directions, can solve the problem of less information, low data accuracy, insufficient obstacle avoidance accuracy, etc problems, to achieve the effect of improving accuracy, improving accuracy and safety, and saving project costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
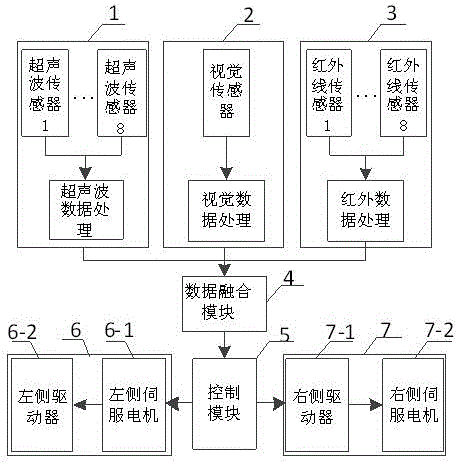
[0034] Specific embodiment one: this embodiment is specifically described with reference to Fig. 1, figure ultrasonic sensor, vision sensor and infrared sensor process the related information of the surrounding environment obstacle that collects through respective corresponding high-speed processor, after processing obstacle information, then Send the data to the signal processor series (TMS320C6201 chip) of the data fusion module. The signal processor fuses the received data according to certain data fusion rules, and then transmits the fusion data to the Googo motion controller (GTS -400-PV-PCI), the Googo motion controller judges and controls the operating environment, and then makes the wheeled robot perform corresponding forward, backward, left-right steering or stop actions through the control execution module to complete real-time obstacle avoidance operation.
specific Embodiment approach 2
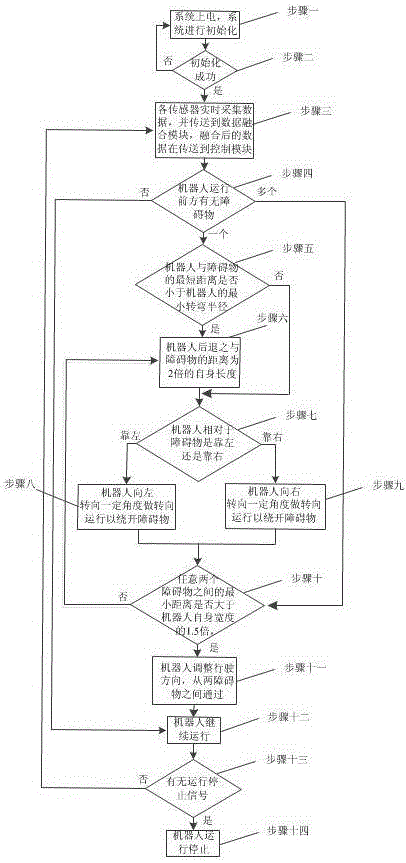
[0035] Specific implementation mode two: refer to figure 2 Specifically explaining this embodiment, according to a wheeled mobile robot obstacle avoidance control system based on multi-sensor information fusion described in Embodiment 1, the information collected by the sensor module is sent to the data processing module for data processing, and then passed through the control module To judge the operating environment and make control decisions, the control module 5 drives the left and right servo drivers 6-1 and 7-1 to drive the servo motors 6-2 and 7-2 to drive the four drive wheels to move in a coordinated manner:
[0036] Step 1. Power on the system to start, initialize the system, and execute step 2.
[0037] Step 2. Determine whether the system is initialized successfully. If yes, execute step 3. If not, execute step 1.
[0038] Step 3. Each sensor collects data in real time, and transmits the collected data to the data fusion module, and the fused data is transmitted t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More