

A wheeled pipeline robot traction device
A pipeline robot and traction device technology, applied in special pipes, pipe components, mechanical equipment, etc., can solve the problem of affecting the working efficiency and service life of the traction device, reducing the motion stability of the traction device, and unable to effectively control the attitude of the driven end, etc. problems, to achieve the effect of convenient structural design and layout, structural symmetry, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
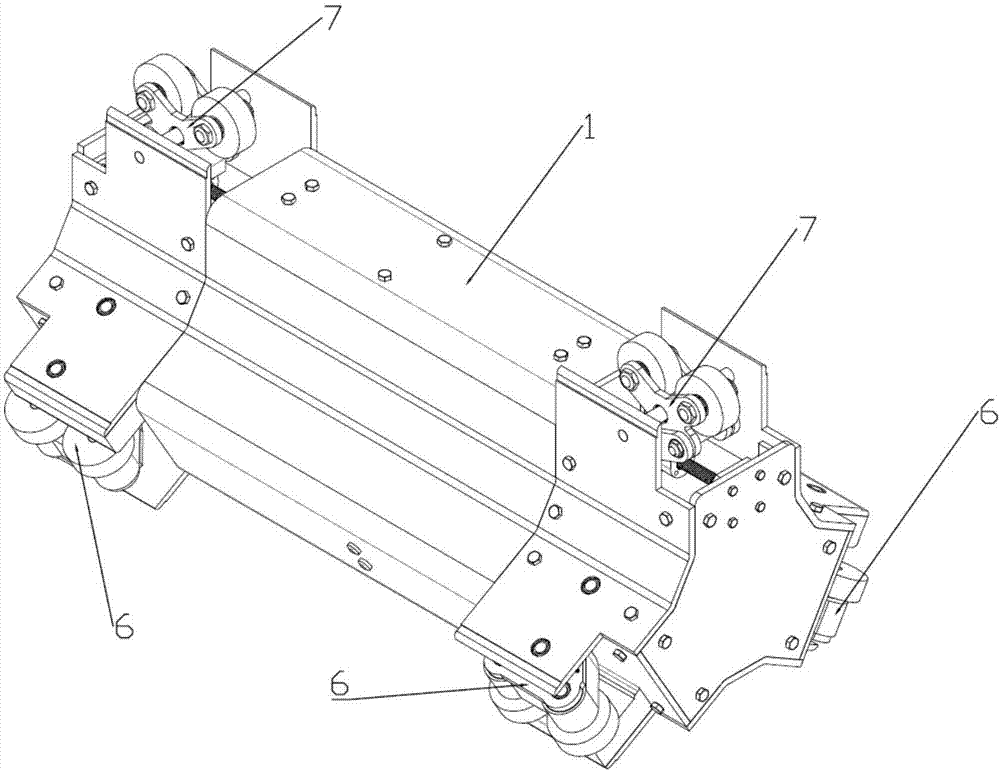
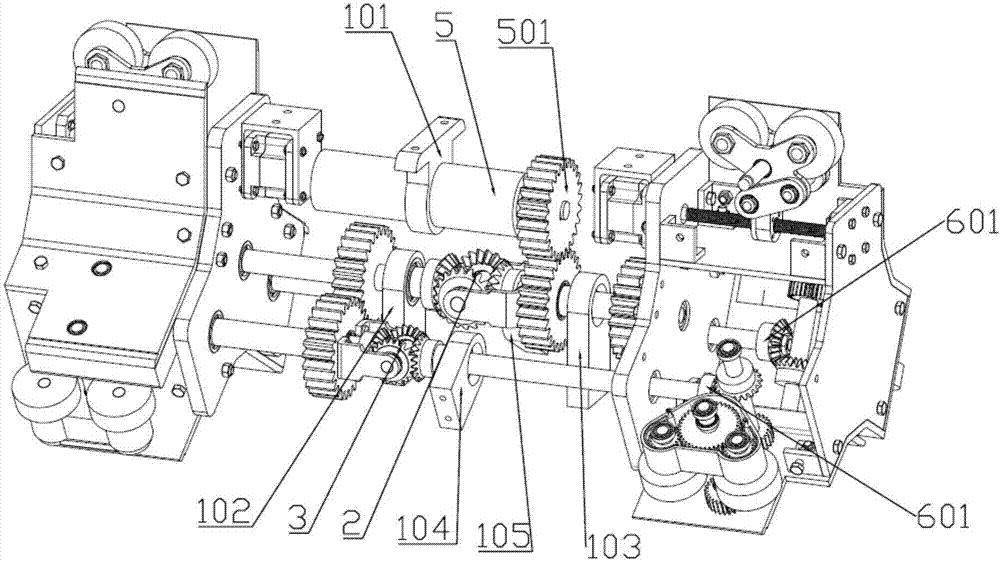
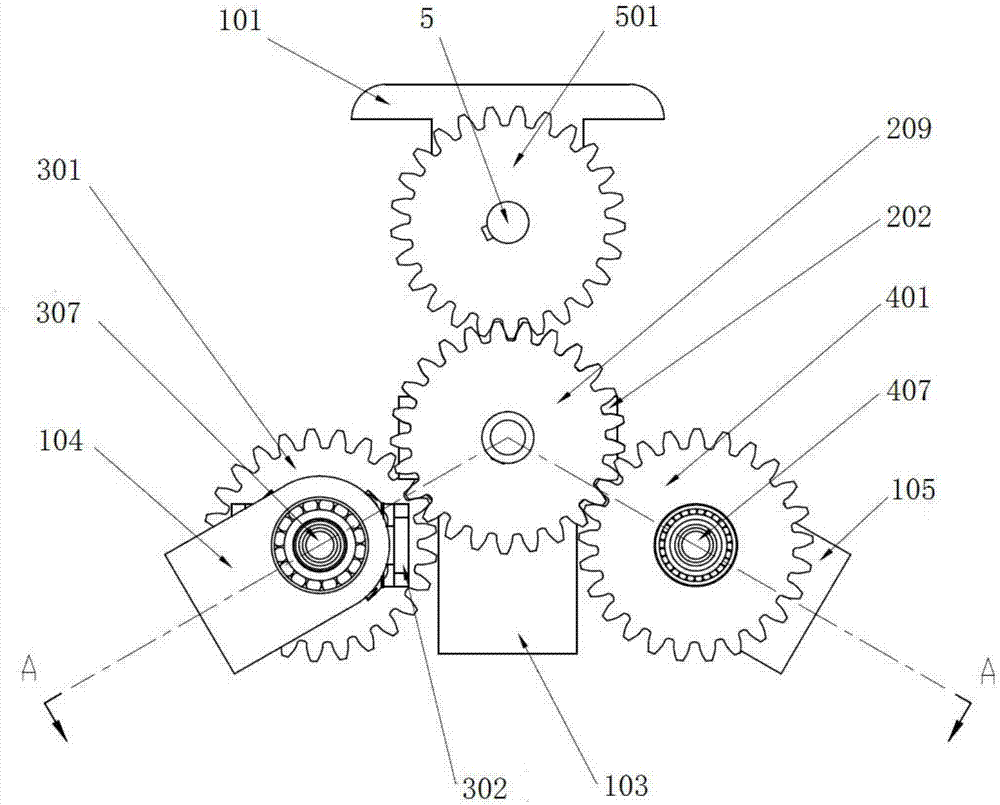
[0029] see Figure 1 to Figure 8 , a wheeled pipe robot traction device, including a housing 1 and a four-axis differential drive device, the four-axis differential drive device includes a transfer case 2 installed in the housing 1, a differential I3, The differential gear II and the drive motor 5, the drive motor 5 is fixed in the housing 1, and a power output gear 501 is installed on the output shaft of the drive motor 5.
[0030] The transfer case 2 is provided with a front transfer shaft 206 and a rear transfer shaft 207, and a transfer input gear 201 and a transfer output gear meshed with the power output gear 501 are arranged on the rear transfer shaft 207 II209, the transfer input gear 201 is rotatably connected to the rear transfer s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More