

Amphibious air cushion shipway point guidance control method
A control method and hovercraft technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc., to achieve the effects of avoiding deceleration, smooth cornering, and improving stability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below with examples in conjunction with the accompanying drawings.
[0029] The present invention realizes according to the following steps:
[0030] 1. Obtaining the position and attitude of the hovercraft
[0031] The current position information of the hovercraft is measured by the position reference system composed of DGPS and radar, and the attitude information of the ship such as heading, slew rate and roll is measured by the attitude sensor system composed of attitude sensor and gyro compass. The acquired information is filtered and space-time aligned to obtain accurate position and attitude information of the hovercraft.
[0032] 2. Calculation of guidance point and expected heading angle
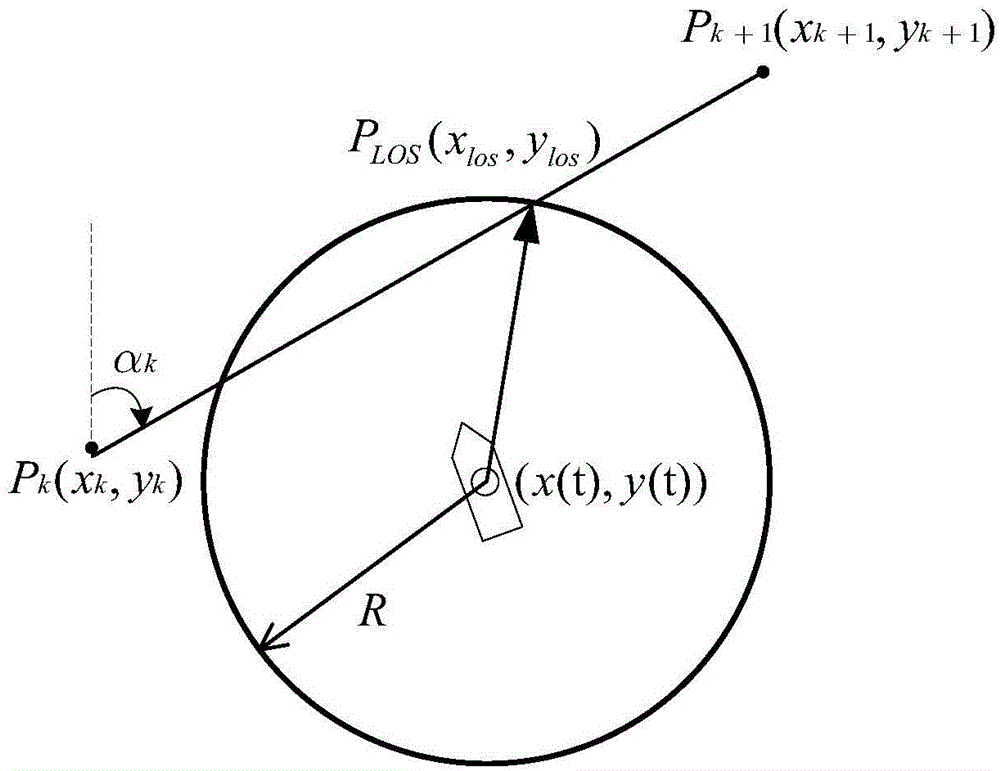
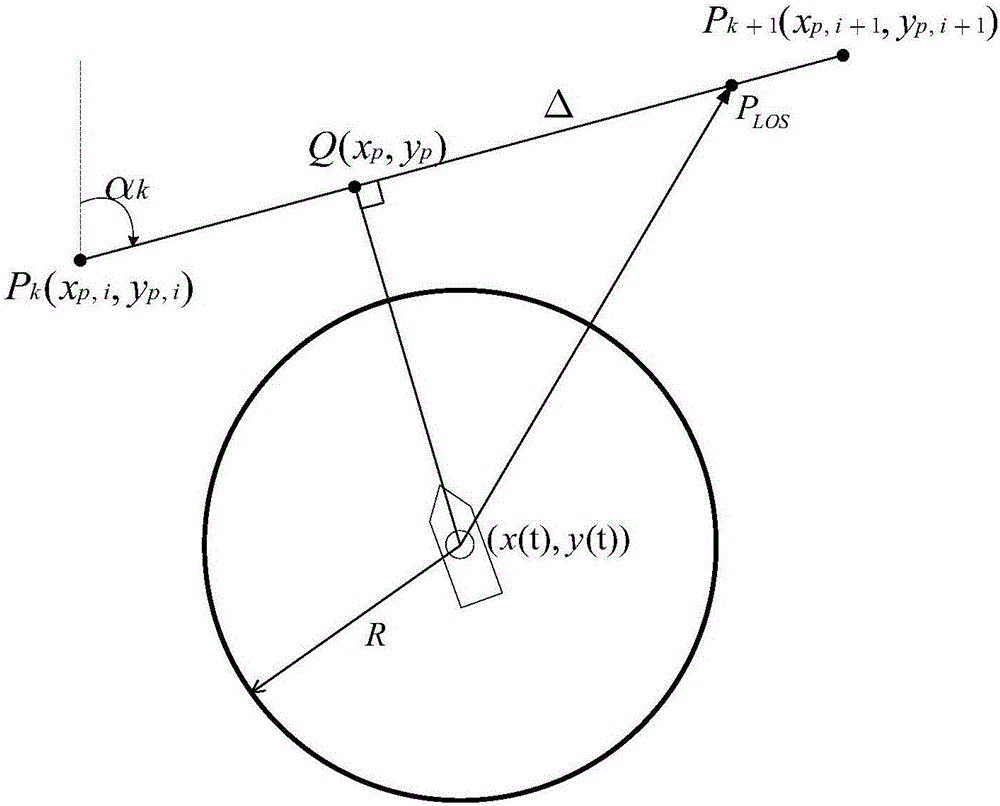
[0033] attached figure 1 The rationale for calculating steering points is shown. Take the real-time position (x(t), y(t)) of the hovercraft as the center of the circle, and take a certain length R (usually a multiple of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More