

A three-body streamlined autonomous operating underwater robot platform
An underwater robot and streamlined technology, applied to underwater operation equipment, manipulators, rotary propellers, etc., can solve problems such as difficult and unstructured seabed environment navigation and operation, limited operating range, operator fatigue, etc. The effect of wide range, high operation precision and strong autonomy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
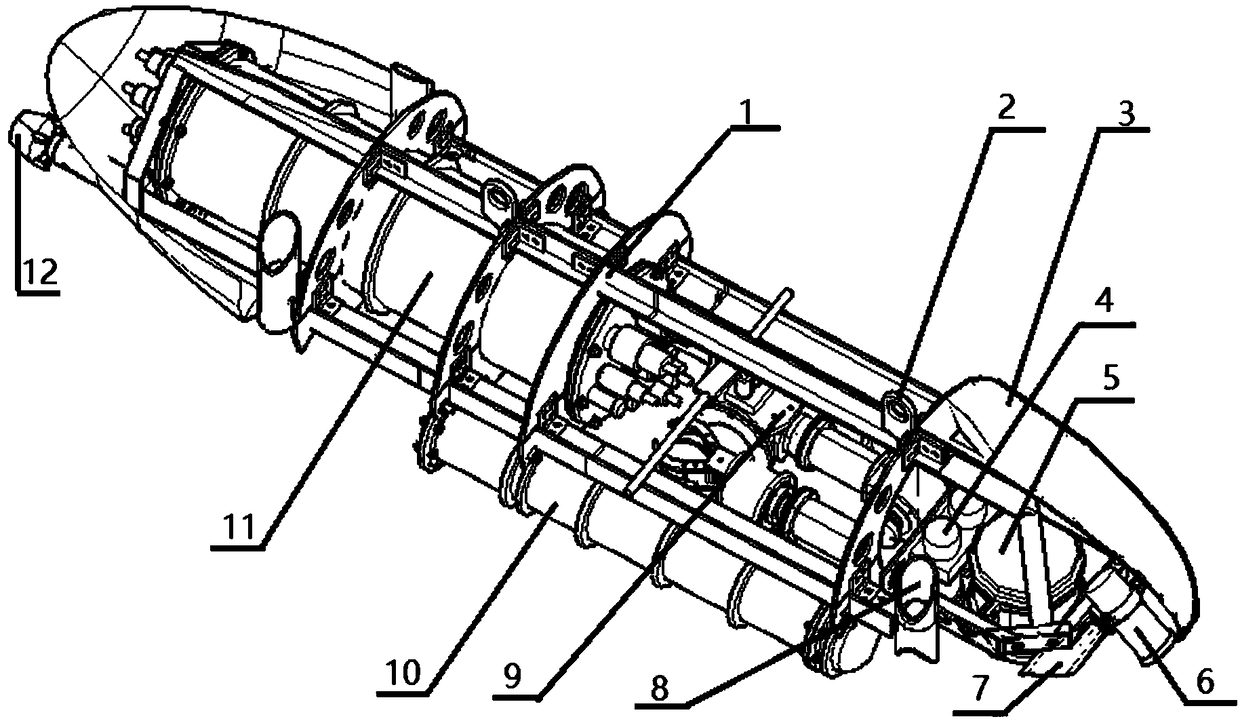
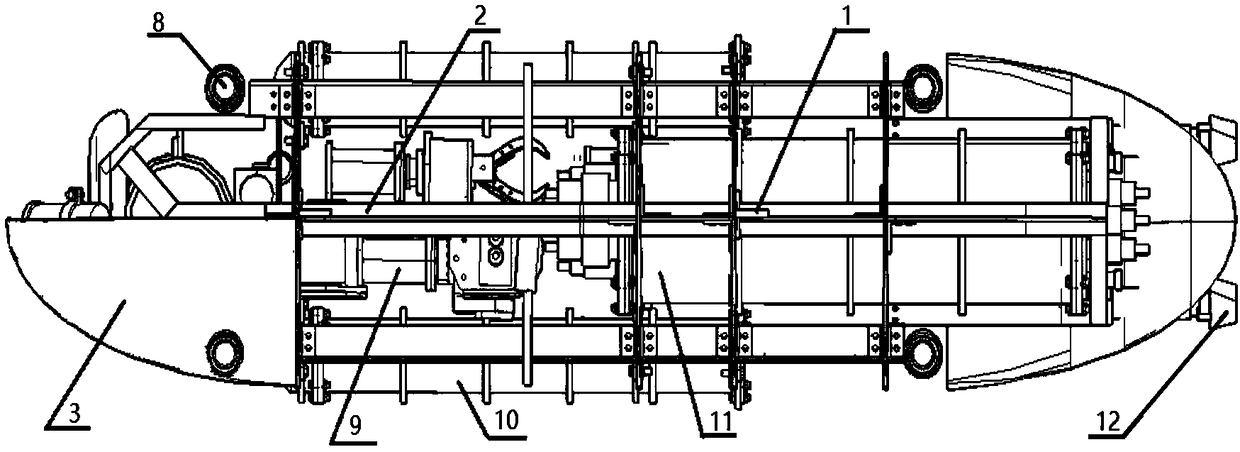
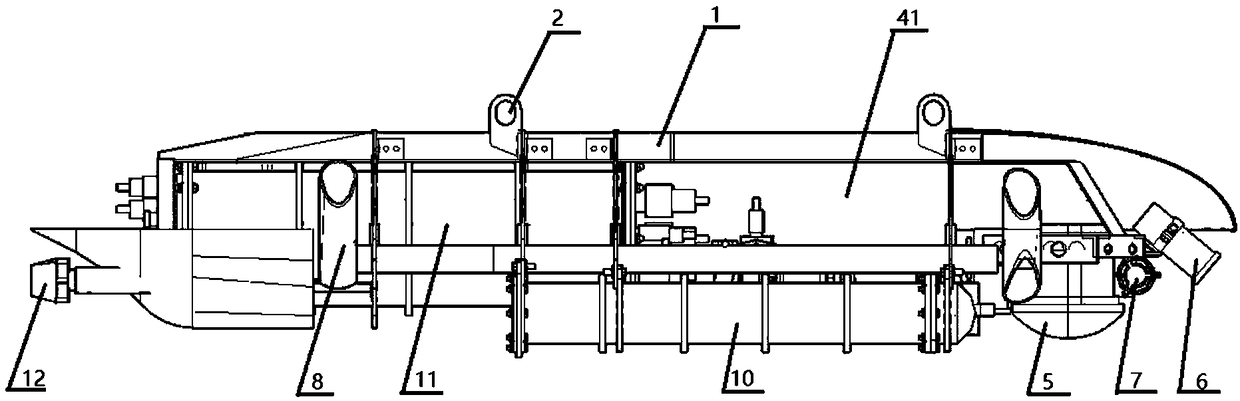
[0024] Example 1: Combining Figure 1 to Figure 10 , the present invention includes a frame 1, a streamlined housing 3, a battery compartment 10, a control compartment 11, a propulsion system, a motion perception system, an underwater visual perception system and two manipulators 9, the streamlined housing 3 is covered on the frame 1, and the battery compartment 10 is installed At the bottom of the streamlined shell 3, the control cabin 11 is arranged in the frame 1, the underwater vision system and the motion sensing system are installed on the front end of the streamlined shell 3, the propulsion system is installed on the streamlined shell 3, The two manipulators 9 are installed on the frame 1, and a cabin 41 for placing buoyant materials is also arranged in the frame.
[0025] In this embodiment, in order to ensure the neutral buoyancy state of the underwater robot, the remaining space will be used to add buoyancy materials.
[0026] In this embodiment, two battery compart...
Embodiment 2
[0028] Embodiment 2: Based on the above-mentioned embodiment, the pushing system includes two main propulsion propellers 12, a side propulsion propeller 7 and four vertical propulsion propellers 8, and the two main propulsion propellers 12 are installed at the rear end of the streamlined shell 3, The side propelling propeller 7 is installed on the lower surface of the front end of the streamlined casing 3, and the lower surface of the front end of the streamlined casing 3 and the lower surface of the rear end are respectively provided with two vertical propulsion propellers 8; the upper surface of the streamlined casing 3 is provided with a lifting point 2 .
[0029] The propulsion system of the present embodiment includes two main propulsion propellers 12, a side propulsion propeller 7 and four vertical propulsion propellers 8, and the two main propulsion propellers 12 at the stern are mainly used during long-distance navigation, and the autonomous operation underwater robot d...
Embodiment 3
[0030] Embodiment three: based on the above-mentioned embodiment, the underwater visual perception system is composed of binocular vision system 4, monocular color underwater camera 6, underwater lighting 13, binocular vision system 4, monocular color underwater camera 6 is installed on the front end in the frame 1, and the underwater illuminating lamp 13 is installed on the lower surface of the streamlined housing 3.
[0031] The monocular color camera 6 is mainly responsible for the identification of underwater targets, the binocular vision system 4 is mainly used for ranging and positioning, and the underwater visual perception system is mainly responsible for the identification, ranging and positioning of underwater targets. The propulsion system includes two main thrusters, one side thruster and four vertical thrusters. During long-distance navigation, the two main thrusters at the stern are mainly used. During operation, the autonomous operation underwater robot platform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More