Multi-robot co-location algorithm based on square root cubature Kalman filtering (SR-CKF)
A Kalman filter and multi-robot technology, applied in instruments, navigation computing tools, measuring devices, etc., can solve problems such as increased calculations, and achieve the effects of improving accuracy, system stability, and reducing truncation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
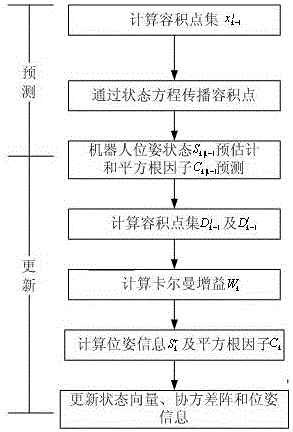
[0059] According to one embodiment of the present invention, as figure 1 As shown, the whole algorithm is divided into two steps: prediction and update. Firstly, the motion equation and observation equation of the robot are established, and the relative orientation is used as the measured value to further obtain the dynamic model of multi-robot cooperative positioning. The prediction stage includes: calculating the volume point set; propagating the volume point through the state equation; pre-estimating the robot pose state and predicting the square root factor. The update stage includes: calculating volume point set; calculating Kalman gain; calculating pose information and square root factor; updating state vector, covariance matrix and pose in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More