

Maximum correntropy volume Kalman filtering method based on statistical linear regression
A technology of maximum correlation entropy and Kalman filtering, which is applied in the field of signal processing, can solve problems affecting the anti-noise ability of the volumetric Kalman filter, and achieve the effect of improving Lupine and anti-noise ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
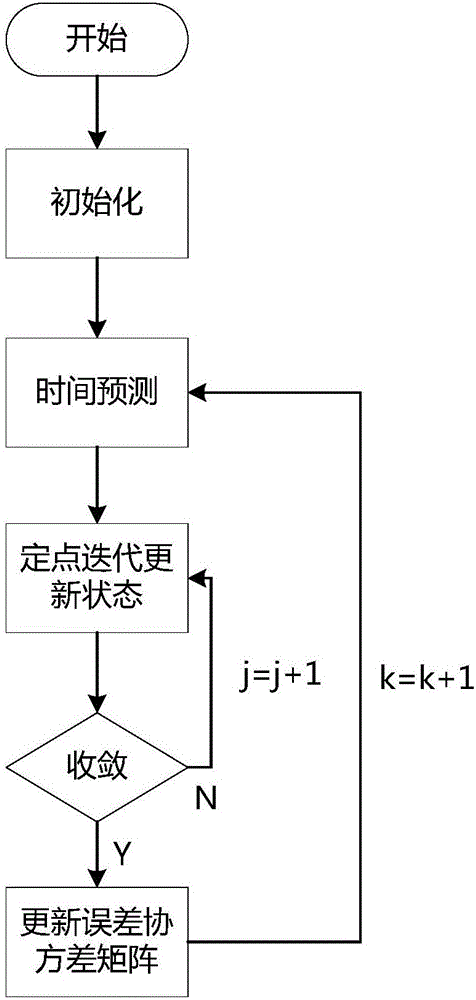
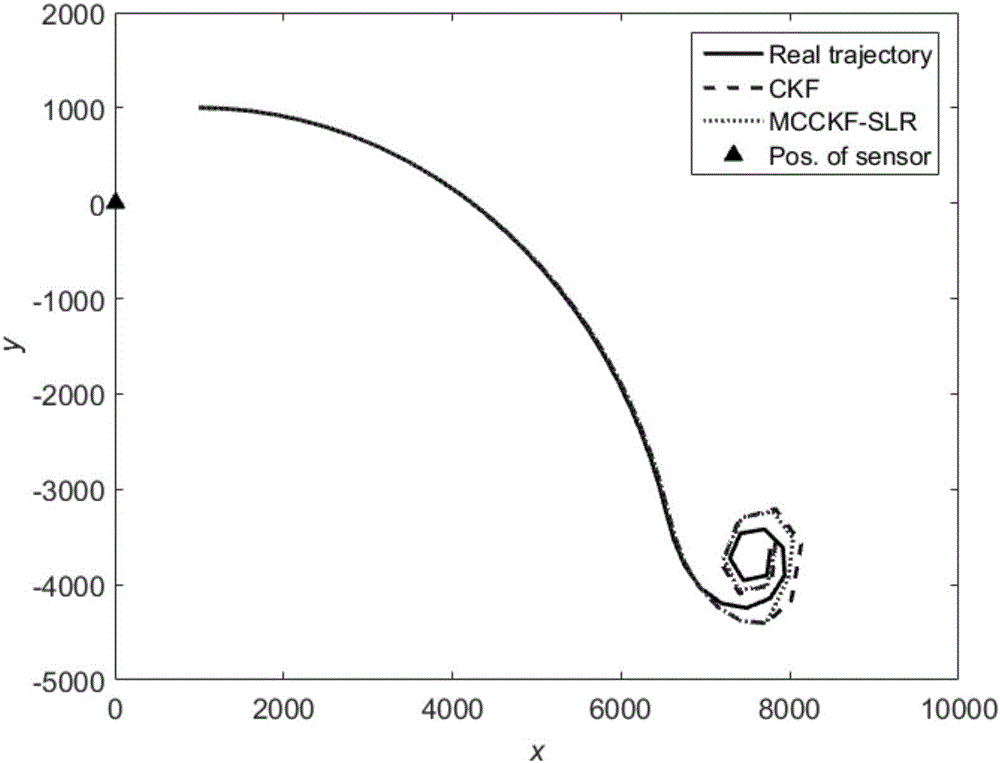
[0089] Such as Figure 1-3 As shown, the above Kalman filter method is used to track the turning of the maneuvering target, and the discrete state space model is as follows:
[0090]
[0091]
[0092] in x k and y k is the location, and Represents the velocity in the x and y directions, r k and θ k respectively represent the distance and angle measured by the radar, and the turning speed ω k The simulation is set to:
[0093]
[0094] Other parameters in the simulation are set to T=1, (s x ,s y )=(0,0). v k and w k is Gaussian noise with mean 0 and covariance matrix Q and R, where
[0095]
[0096] and
[0097] According to the above-mentioned maximum correlation entropy volumetric Kalman filtering method based on statistical linear regression, the filtering algorithm is first initialized. The actual initial value of the state and the initial value of the covariance matrix P 0 respectively set to P 0 =diag([100,10,100,10,1×10 -4 ]), the...
Embodiment 2
[0099] Replace the simulation model with a univariate non-stationary growth model. The state space model is as follows:
[0100]
[0101]
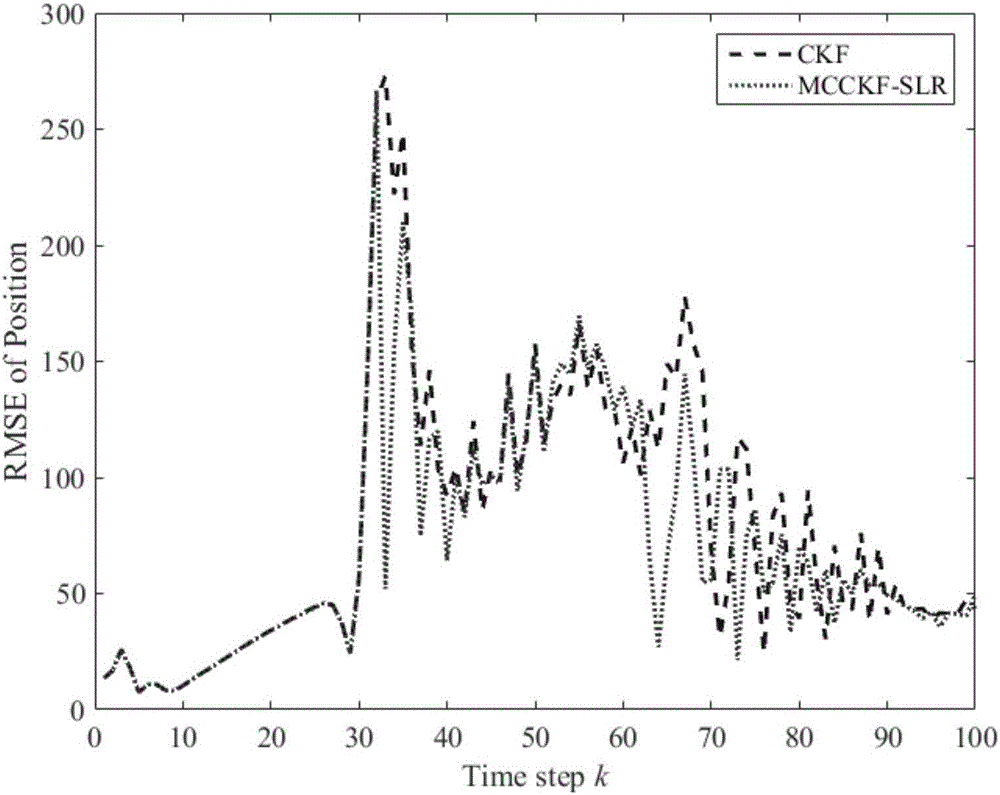
[0102] where q k =1. According to the above-mentioned maximum correlation entropy volumetric Kalman filter method based on statistical linear regression and then simulated, we can get Figure 4 and 5 . The initial value and variance of the state are set as P 0 =1. Compared with Example 1, Example 2 changes the noise r in the model k statistical properties. exist Figure 4 In the simulation of , a new noise item is added on the basis of the noise of the original model with a probability of 0.5 σ r =1. in the same way in Figure 5 The noise term added in the simulation is From Figure 4 and 5 It can be seen that, with the increase of the non-Gaussian degree of the mixed Gaussian noise, the performance of the algorithm is more and more improved than that of CKF.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More