

Topological graph-based intelligent navigation method and system
A technology of intelligent navigation and topological graph, which is applied in the computer field, can solve problems such as single action decision-making, difficult real driving, difficult autonomous navigation, etc., and achieves the effect of improving accuracy and improving Lupine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038]Exemplary embodiments of the present invention are described below in conjunction with the accompanying drawings, which include various details of the embodiments of the present invention to facilitate understanding, and they should be regarded as exemplary only. Accordingly, those of ordinary skill in the art will recognize that various changes and modifications of the embodiments described herein can be made without departing from the scope and spirit of the invention. Also, descriptions of well-known functions and constructions are omitted in the following description for clarity and conciseness.
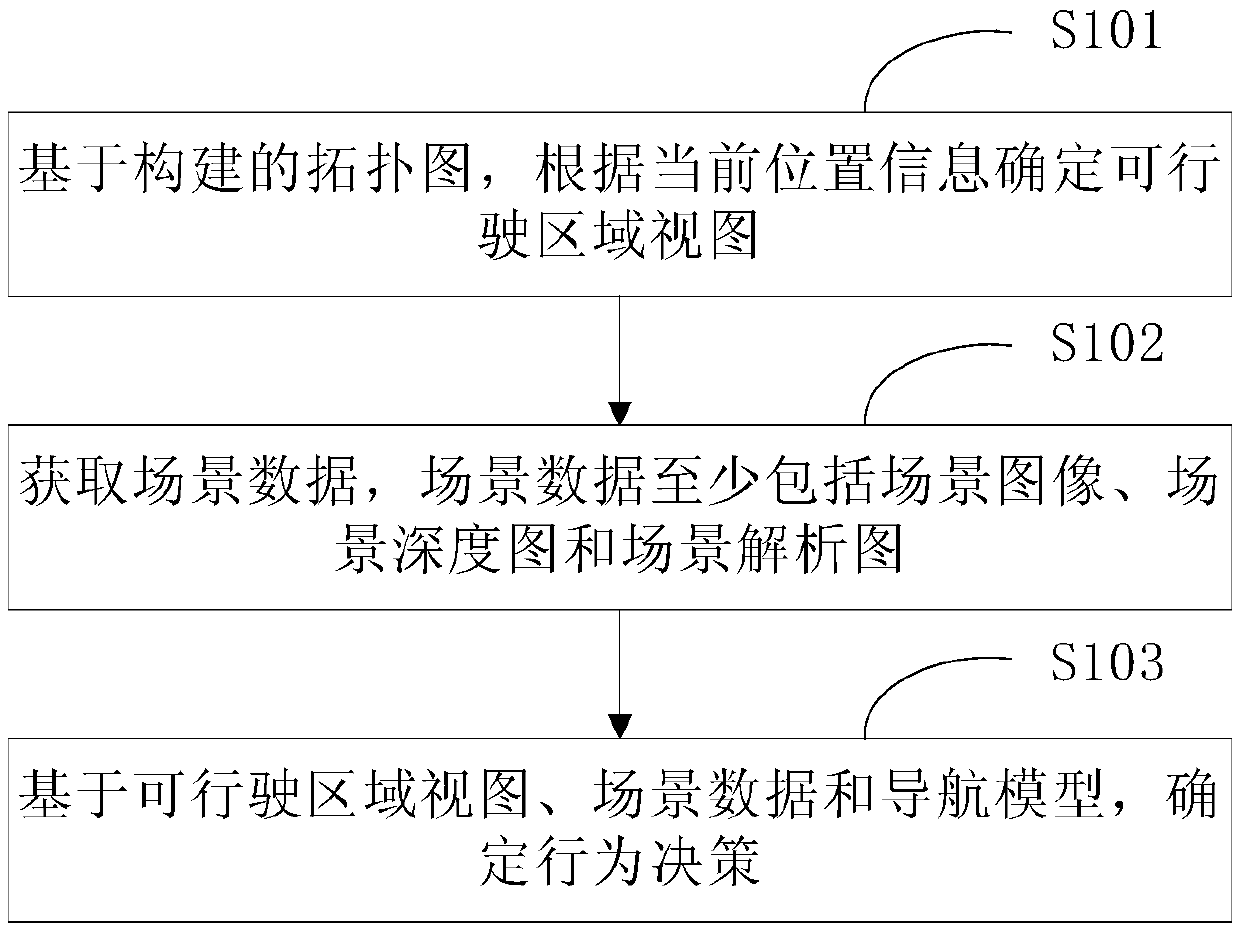
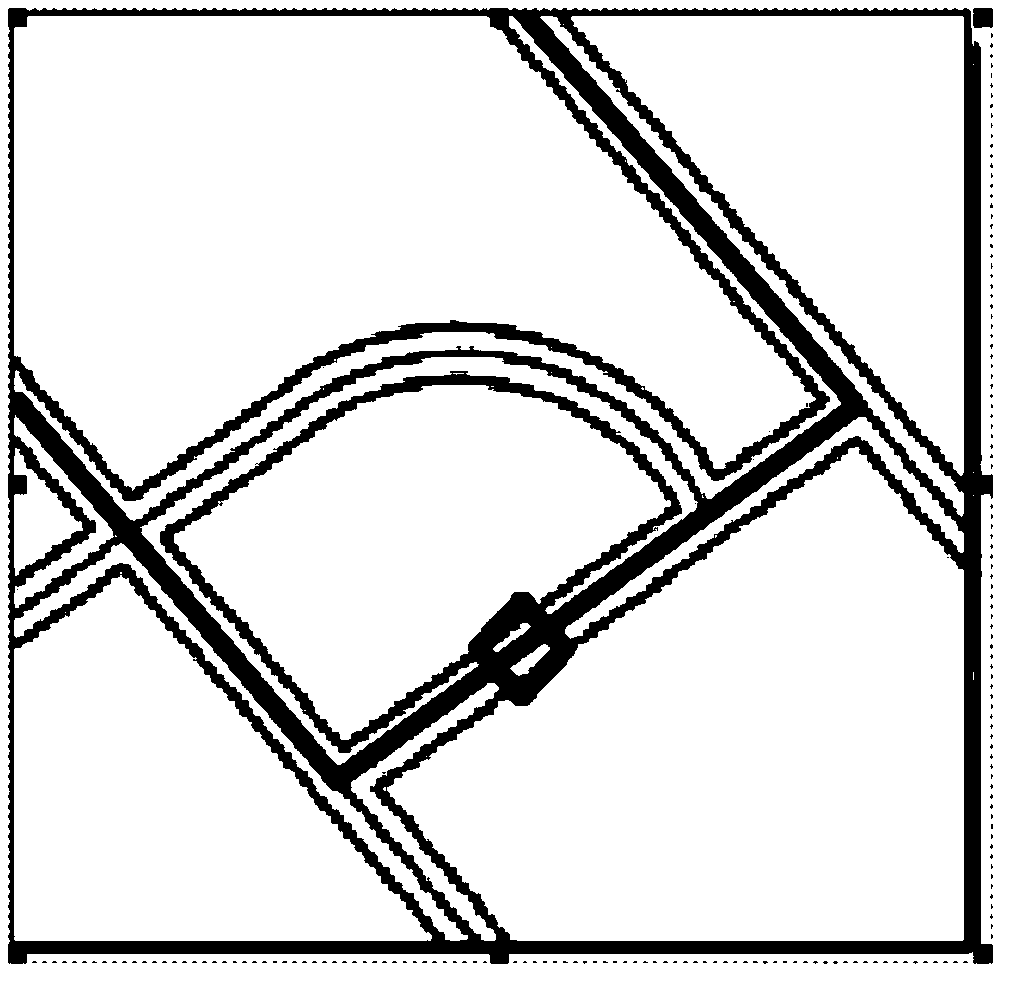
[0039] figure 1 is a schematic diagram of the main flow of a method for intelligent navigation based on a topology map according to an embodiment of the present invention, figure 2 is a schematic diagram of the drivable area of the method for intelligent navigation based on topological maps according to an embodiment of the present invention.
[0040] Such as figure 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More