

Wearable type knee joint power-assisted robot
A knee-joint and wearable technology, which is used in appliances to help people move around, physical therapy, etc., can solve the problems of poor comfort, inability to put on and take off quickly, and complicated problems, so as to improve safety and comfort, reduce The effect of energy consumption, enhancing coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040]The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
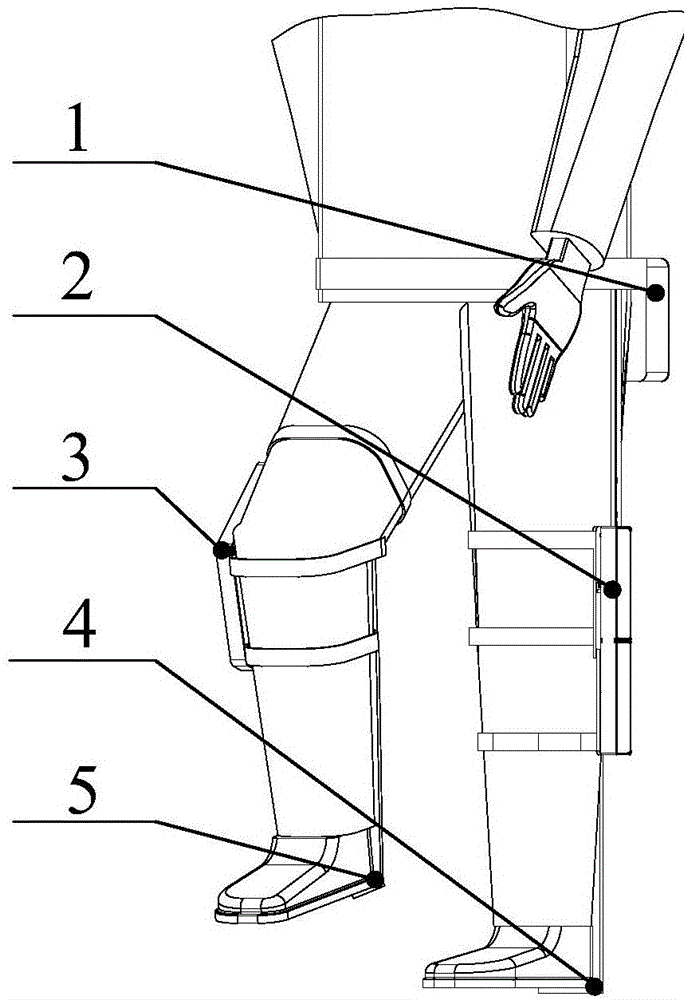
[0041] figure 1 It is a composition diagram of the wearable knee joint assisting robot of the present invention. Such as figure 1 As shown, a wearable knee-assisted robot is mainly composed of control system components 1, left leg flexible actuator 2, right leg flexible actuator 3, left foot film pressure sensor group 4, right foot film pressure The sensor group is composed of 5 and so on. As shown in the figure, the flexible actuator 2 of the left leg and the flexible actuator 3 of the right leg respectively act on the knee joints of the left and right legs. The control system component 1 provides gait cycle parameters according to the left foot plantar membrane pressure sensor group 4 and the right foot membrane pressure sensor group 5 to control the air bag air pressure of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More