

A Real-time 3D Reconstruction Method Complementary to Coupling Inertial Positioning and Point Cloud Registration
A technology of inertial positioning and point cloud registration, applied in 3D modeling, image analysis, image enhancement and other directions, it can solve the problems of divergence of estimated results, deviation of estimated results from actual results, and loss of constraint effect of inertial positioning data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
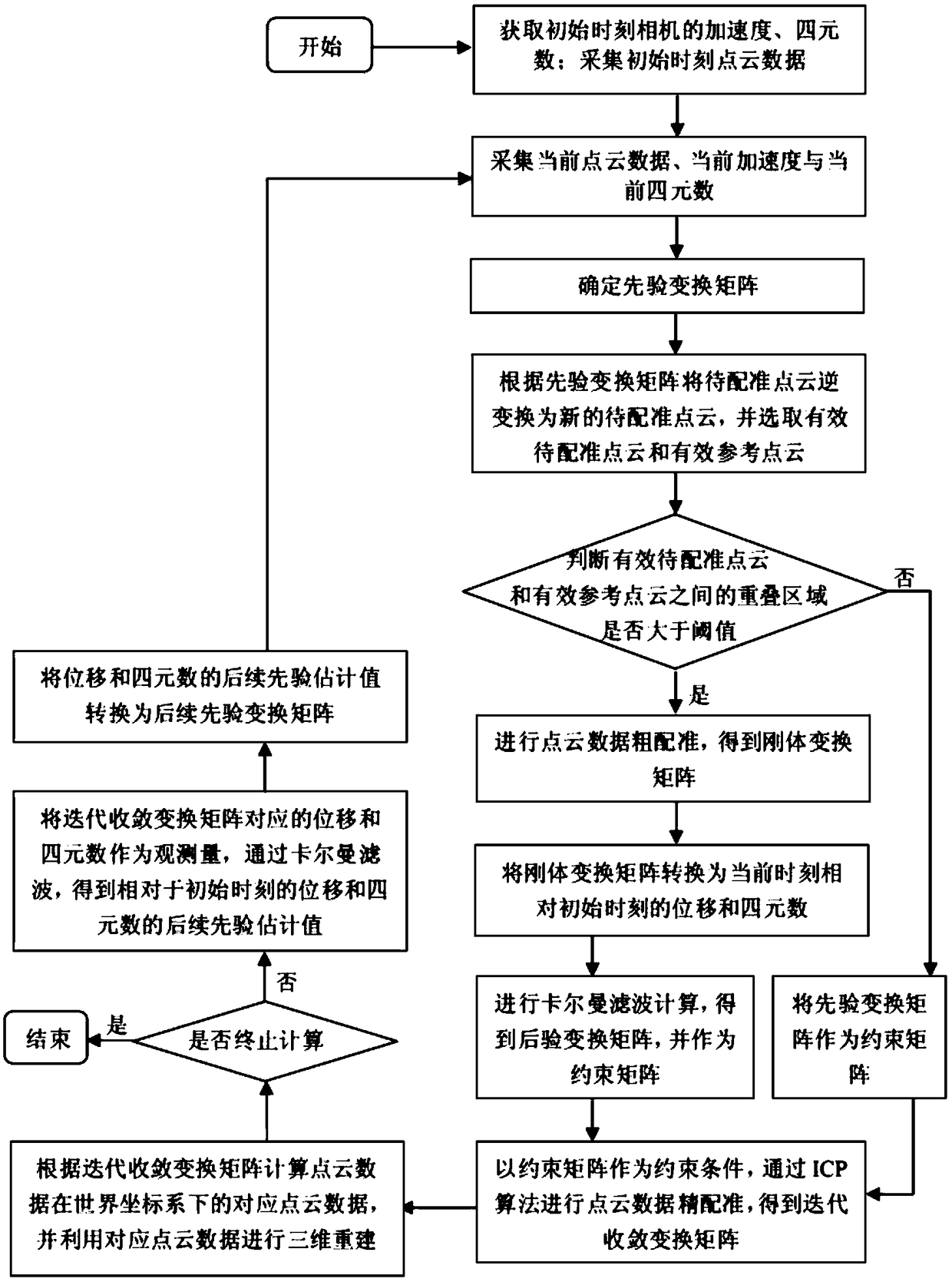
[0094] Such as figure 1 As shown, the specific steps of the real-time three-dimensional reconstruction method of the present invention coupled with inertial positioning and point cloud registration are as follows:
[0095] (1) The inertial unit composed of gyroscope and accumulator acquires the camera acceleration a at the initial moment ini =(a x,ini a y,ini a z,ini ) T , quaternion q ini =(q 0,ini q 1,ini q 2,ini q 3,ini ) T ; The RGB-D sensor obtains the point cloud data at the initial moment;
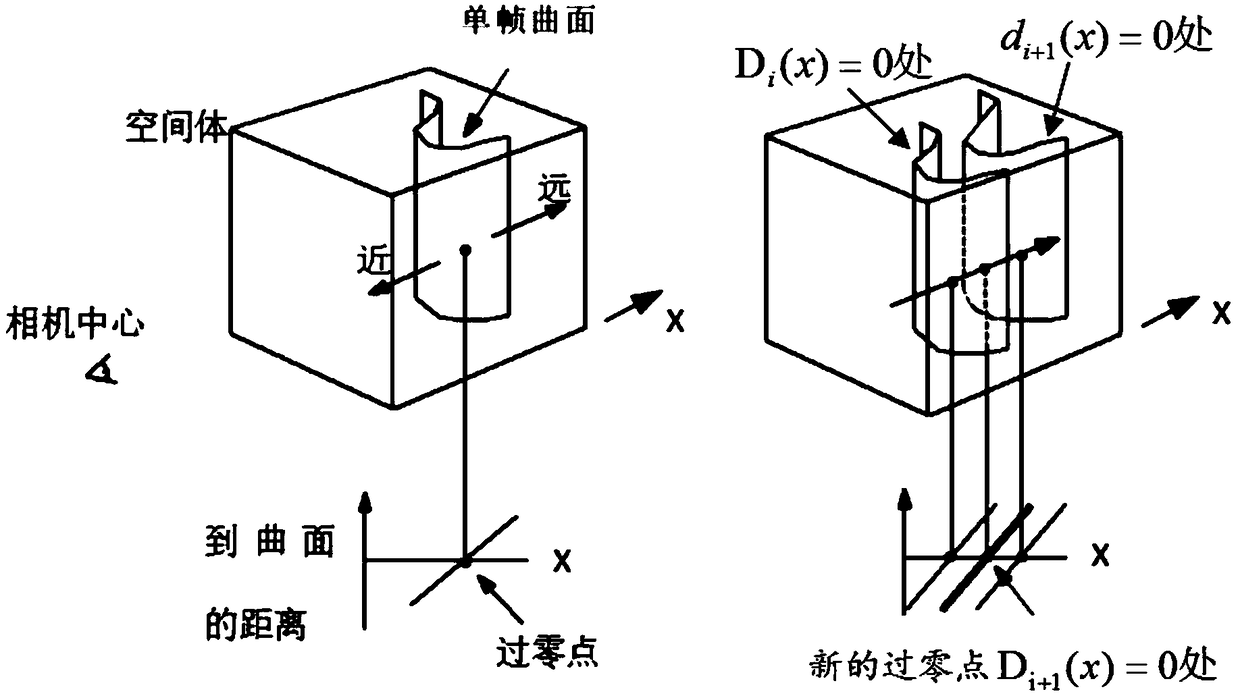
[0096] The point cloud data is processed, and the point cloud data is transformed into truncated signed distance field (TSDF) data through the voxel grid-based sampling method. The schematic diagram of the method is as follows figure 2 Shown: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More