

Rehabilitation and walking exoskeleton robot based on master-slave control
An exoskeleton robot and exoskeleton technology, applied in gymnastics equipment, passive exercise equipment, vehicle rescue, etc., to enhance the sense of participation, ensure safety, and achieve the effect of rehabilitation exercise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
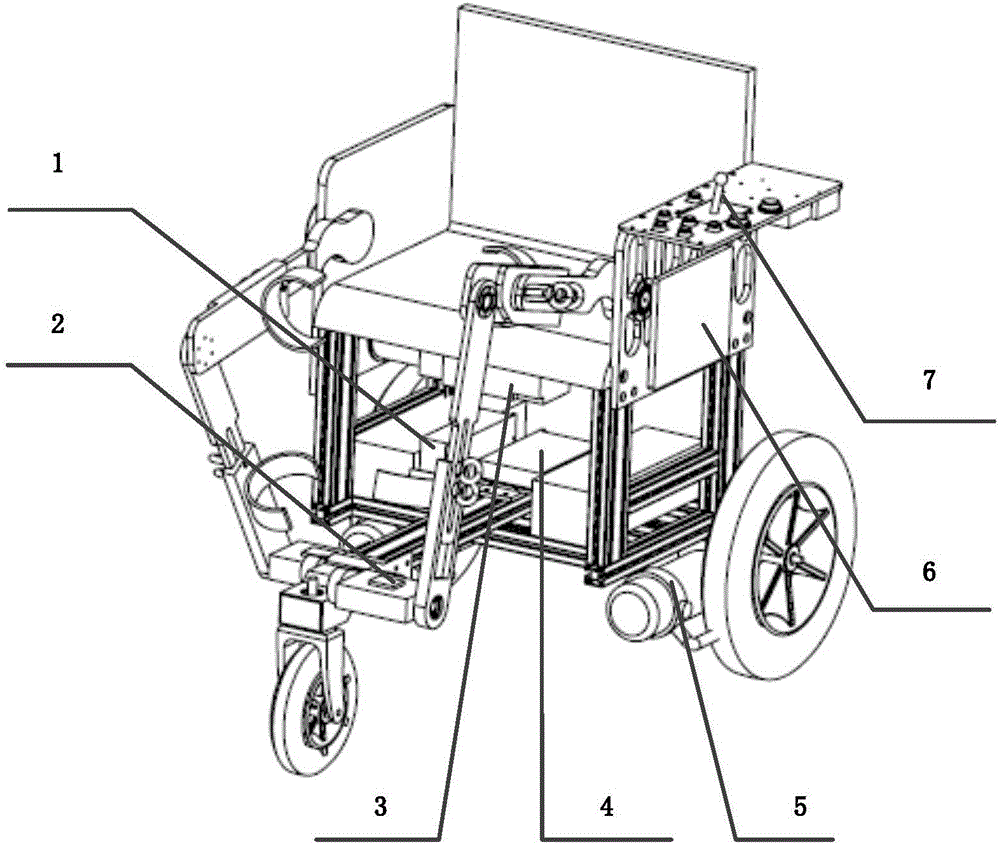
[0048] figure 1 Shown is the rehabilitation and mobility exoskeleton robot based on the master-slave control of the present invention. The robot efficiently combines a wheelchair with a mobility function and a rehabilitation exoskeleton to realize the mobility function while effectively recovering the user's lower limbs. Training sports. The robot is composed of a wheelchair frame 8, an exoskeleton skeleton 9, a force sensor 2, and an operation panel 7. The power components in the wheelchair frame 8 are a wheelchair motor 5 and a wheelchair motor driver 1, and the power component in the exoskeleton is an exoskeleton Motor 3 and exoskeleton motor driver 4.
[0049] The wheelchair motor driver 1 is installed in the wheelchair frame 8 and is connected to the wheelchair motor 5 through wires, and is used to control the start, stop and operation of the wheelchair motor 5.
[0050] The force sensor 2 is installed on the foot pedal, and is connected to the STM32 main controller 6 install...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More