

A control method for space debris recovery based on tether technology
A space debris and control method technology, applied in space navigation equipment, space navigation aircraft, space navigation equipment, etc., can solve problems such as deviation, consumption of large computing resources and time, inability to obtain analytical control laws, etc., to ensure safety sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
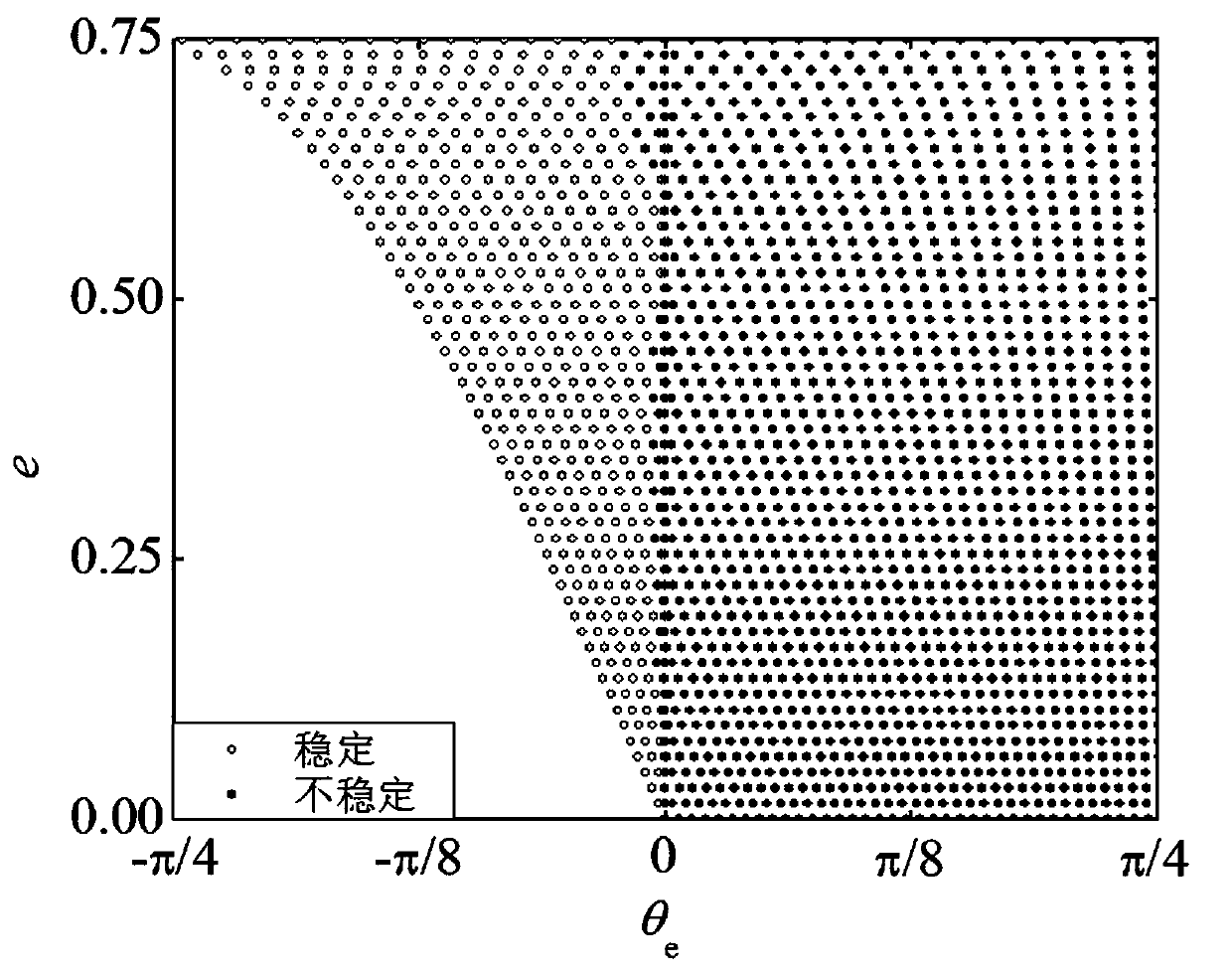
[0060] The invention is based on the dynamic equation of the three-dimensional nonlinear time-varying tether system in space, and proposes an analytical control law for tether debris recovery, which can suppress the in-plane and out-of-plane swing of the tether during the radial recovery process. Based on various system constraints, the range of expected recovery inclination is obtained. Finally, Floquet theory is used to further determine the range of expected recovery inclination that can keep the system asymptotically stable during the recovery process. The specific method is as follows.
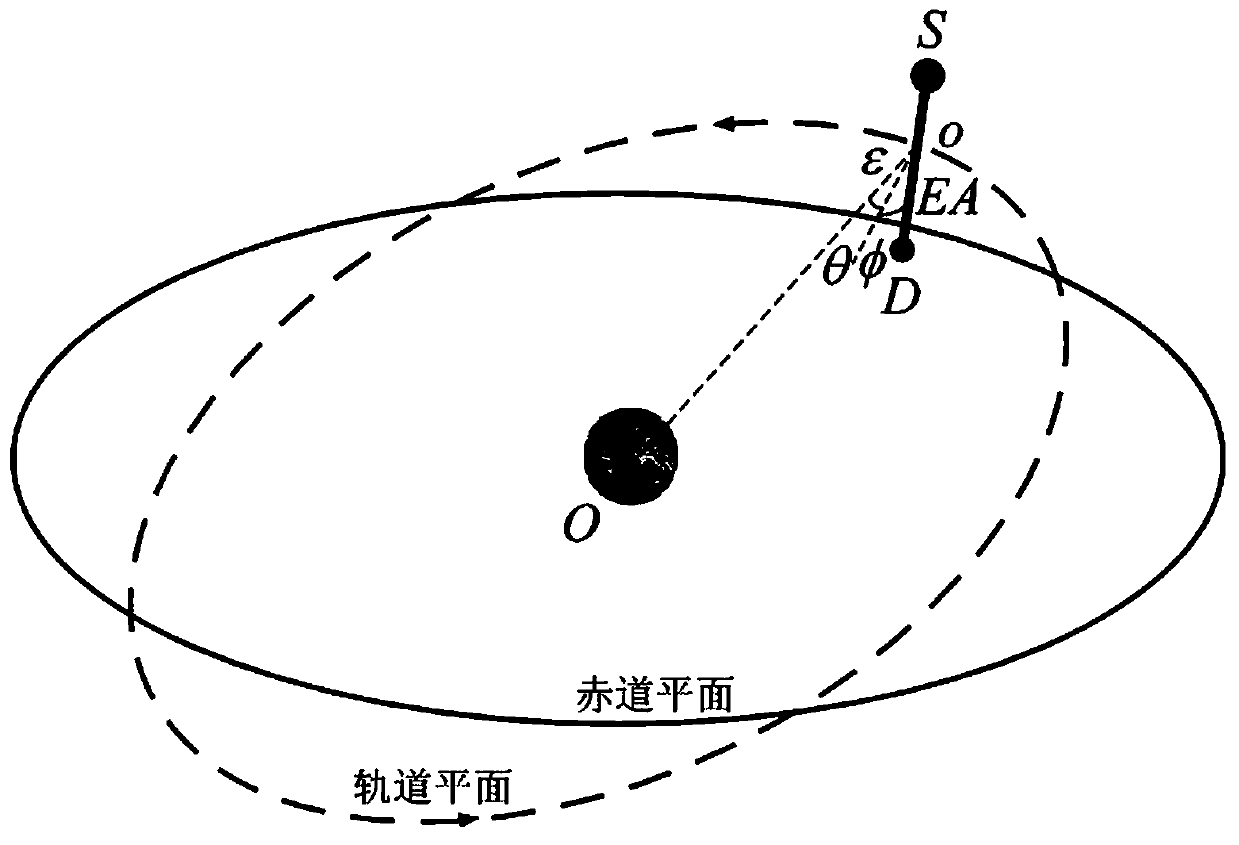
[0061] Such as figure 1 As shown, since the space tether debris system is always in a taut state during the recovery phase, the elastic rod model is used to study the in-plane and in-plane oscillations of the system considering the strain of the tether. The visual quality is m S and m D The in-orbit spacecraft S and space debris D are particles, and the space tether with recovery lengt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More