

Oil-powered multi-rotor unmanned aerial vehicle autopilot
A multi-rotor drone and autopilot technology, applied in the field of drones, can solve problems such as weak battery life, and achieve the effects of anti-electromagnetic interference, good fault tolerance, and strong anti-vibration ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings, so as to better understand the present invention.
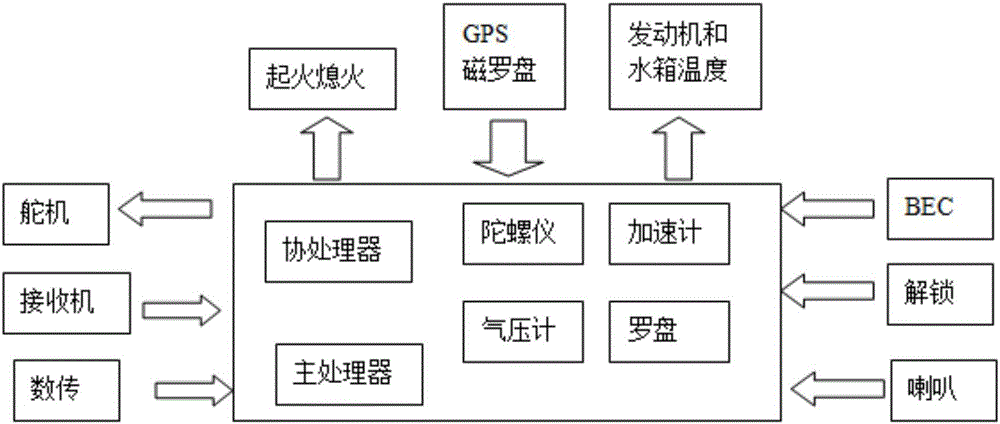
[0024] Such as figure 1 The oil-powered multi-rotor UAV autopilot shown, including the main processor, coprocessor, gyroscope, barometer, accelerometer and compass, the main processor, coprocessor, gyroscope, barometer, accelerometer The main board is packaged with the compass on the main board. The main board is equipped with multiple control interfaces, including power input interface, receiver, steering gear control interface, data transmission interface, GPS interface, gyroscope, barometer, accelerometer and compass. On the main processor, the power input interface is used to connect the external power supply, BEC is used for power supply and power collection; the receiver is connected to the PPM module, the steering gear control interface is used to connect the steering gear, and the digital transmi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More