

Underwater robot control system based on Arduino platform and robot vision module
An underwater robot and machine vision technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of complex control system structure, difficult development, long development cycle, etc., and achieve simple system structure, easy development, high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028]Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
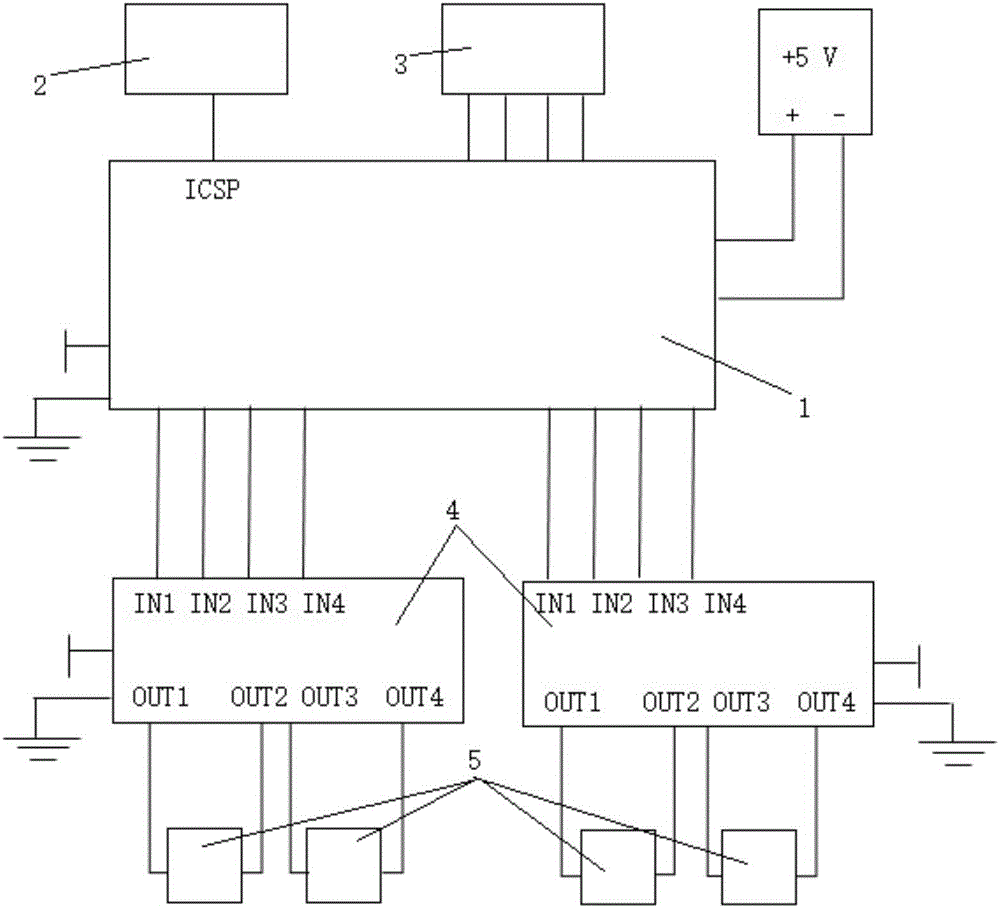
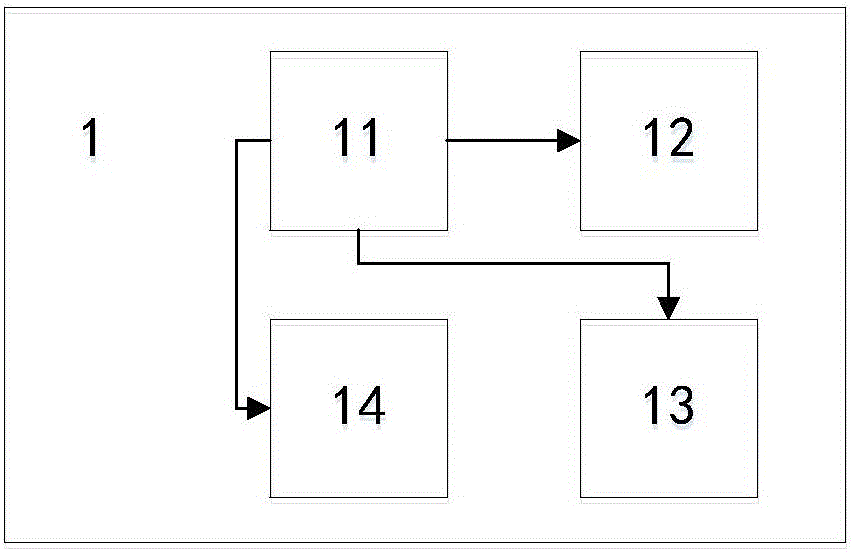
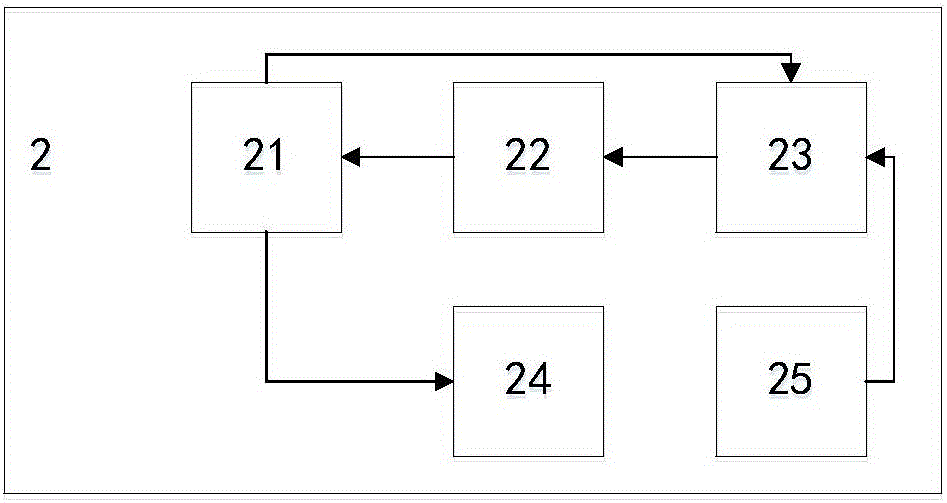
[0029] Such as figure 1 As shown, an underwater robot control system based on Arduino platform and machine vision module, including Arduino controller 1, machine vision sensor 2, Bluetooth module 3 and motor drive module 4.
[0030] The position and functional connection relationship of each part of the system is: the Arduino controller 1 uses a FC-10P data line to connect with the machine vision sensor 2 through the ICSP interface and transmits and receives data, and the Arduino controller 1 passes 8 digital I / O The O interface is connected with two motor drive modules 4 . The machine vision sensor 2 calculates the position of the target object and the distance between the two, and the Arduino controller 1 reads the scanning results of the vision sensor 2 every 50 milliseconds, and can quickly obtain the number of the recognized object, the coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More