Horse-imitating gait planar connection rod type quadruped walking robot
A walking robot and planar connecting rod technology, applied in the field of robotics, can solve the problems of complex structure and high cost of robots, and achieve the effects of good dynamic walking ability, low cost and high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
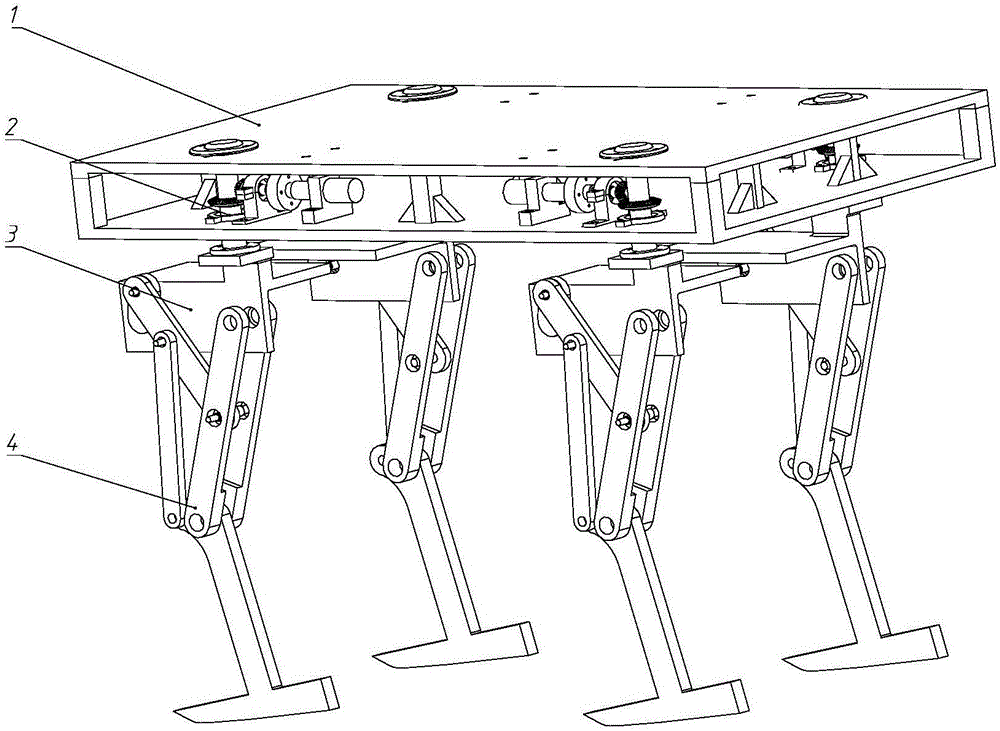
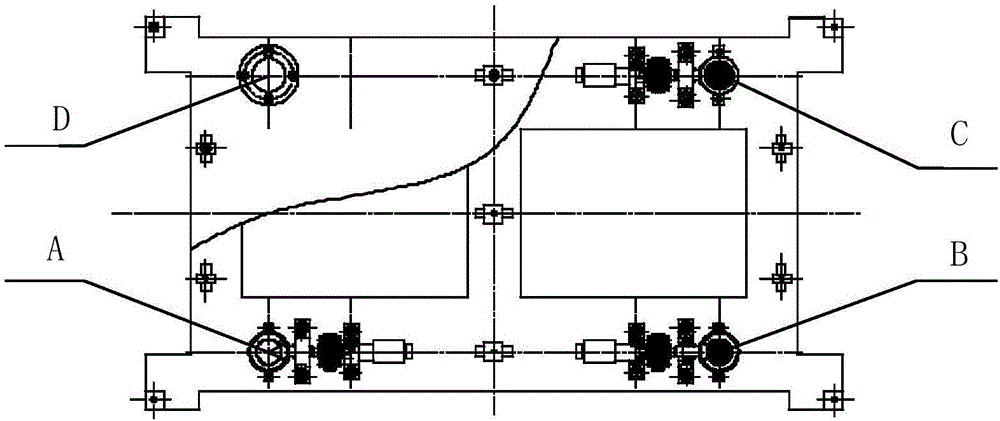
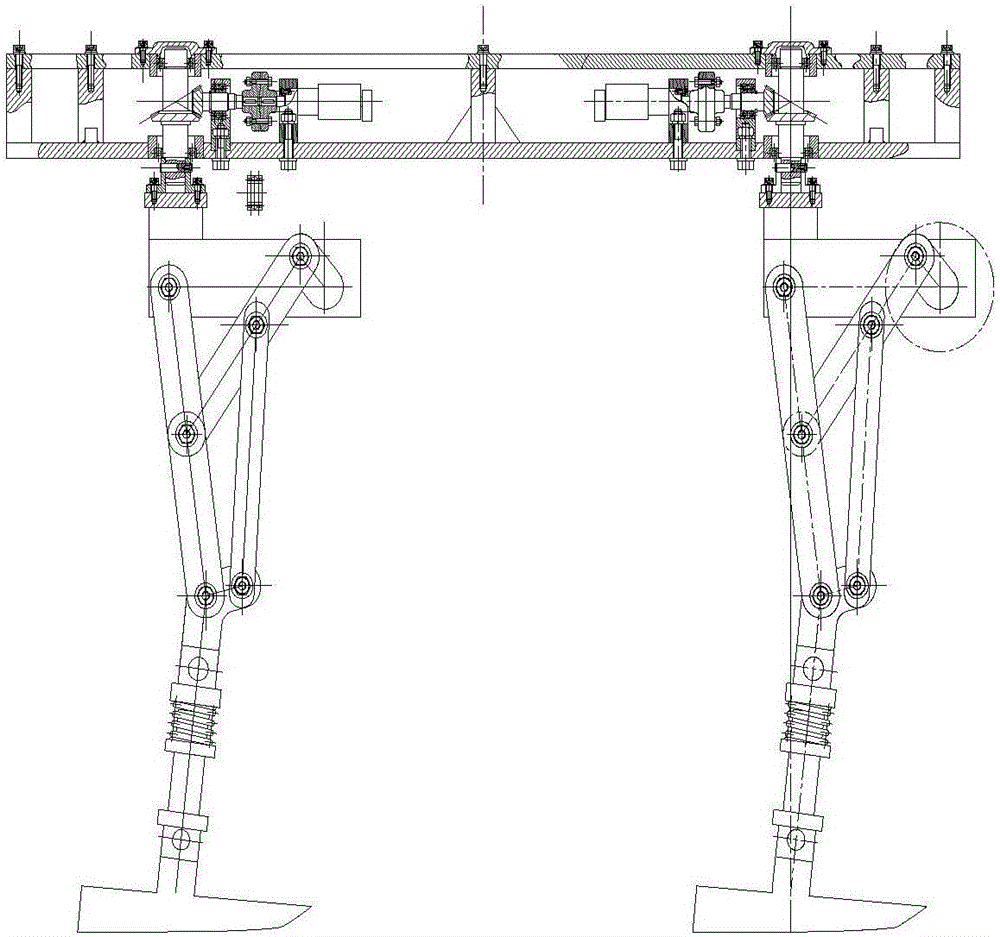
[0021] figure 1 , figure 2 , image 3 , Figure 4 Shown is a planar link-type four-legged walking robot imitating a horse gait. The robot is composed of a frame 1, a turning mechanism 2, a lower body 3 and four legs A-D of the same structure. The turning mechanism 2 and the leg mechanism 4 are arranged at the four corners of the frame 1, which are left-right symmetrical. The turning mechanism 2 is mainly composed of a servo motor 213, a shaft coupling 210 and straight bevel gears 205, 209, which are fixed on the frame 1, and The lower body 3 is connected through flange structures 201 and 202; the leg mechanism 4 is composed of a thigh mechanism and a lower leg mechanism, and adopts a planar six-bar linkage mechanism, wherein the thigh mechanism adopts a crank rocker mechanism 403-406, and the lower leg mechanism adopts double rock...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More