

Method for constructing multi-mode environmental map in three-dimensional environment
A technology of environmental maps and construction methods, applied in structured data retrieval, geographic information databases, instruments, etc., can solve the problems of insufficient compactness of expression, complex calculation of mixed maps, and occupation of memory resources, etc., and achieve the effect of easy expression
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to better understand the technical solution of the present invention, further description will be made below in conjunction with the accompanying drawings. A method for constructing a multimodal environment map in a three-dimensional environment, comprising the following steps:
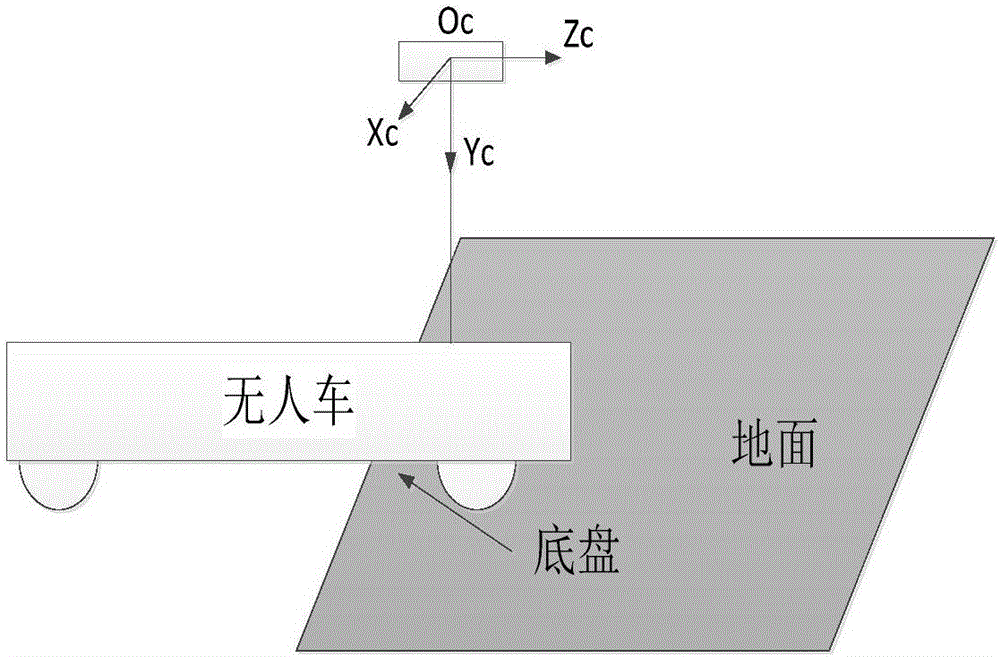
[0042] Step 1. The unmanned vehicle is in the automatic operation mode of randomly exploring the environment. The binocular camera of the unmanned vehicle collects environmental images and establishes a sparse visual feature map. The reference coordinate system of the map is called the feature map coordinate system, and the origin of the coordinates is the unmanned The center of the camera when the car is started, the front is the positive direction of the z-axis, and the right is the positive direction of the x-axis, and the data of the feature map is stored in the local disk of the on-board computer in the form of a binary file.
[0043] In order to make the unmanned vehicle collect ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More