

Binocular visual sense depth information obtaining method based on deep learning
A technology of depth information and binocular vision, applied in the field of stereo vision, can solve the problems of inapplicability, large distance, poor effect, etc., and achieve the effect of convenient expansion and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0021] This embodiment provides a method for acquiring binocular stereo information based on deep learning. The specific implementation method is as follows: Step 1: Acquire binocular pictures and depth pictures. Get N pairs of pictures taken by the binocular vision system {P i |i=1,2,...,N}, each image pair includes the left image captured by the left camera and the right picture taken by the right camera The superscript i represents the image order. Get each image pair P at the same time i The corresponding depth map D i . {P i ,D i |i=1,2,...,N} constitute the original data set.
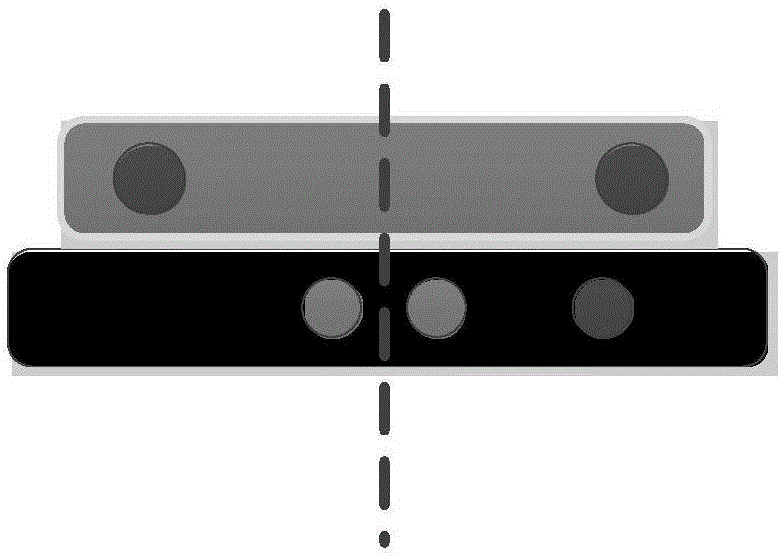
[0022] The depth camera for collecting data in the present invention adopts Microsoft Kinect (using TOF-time-of-flight technology). When collecting, it should be as close as possible to the binocular camera, and ensure that the center position is aligned. The pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More