

Mobile vision robot and measurement and control method thereof
A measurement and control method and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large GPS guidance errors, high requirements on the working environment, fixed moving paths, etc., and achieve strong anti-interference ability and small environmental requirements Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following describes the implementation of the present invention in detail with reference to the drawings and embodiments.
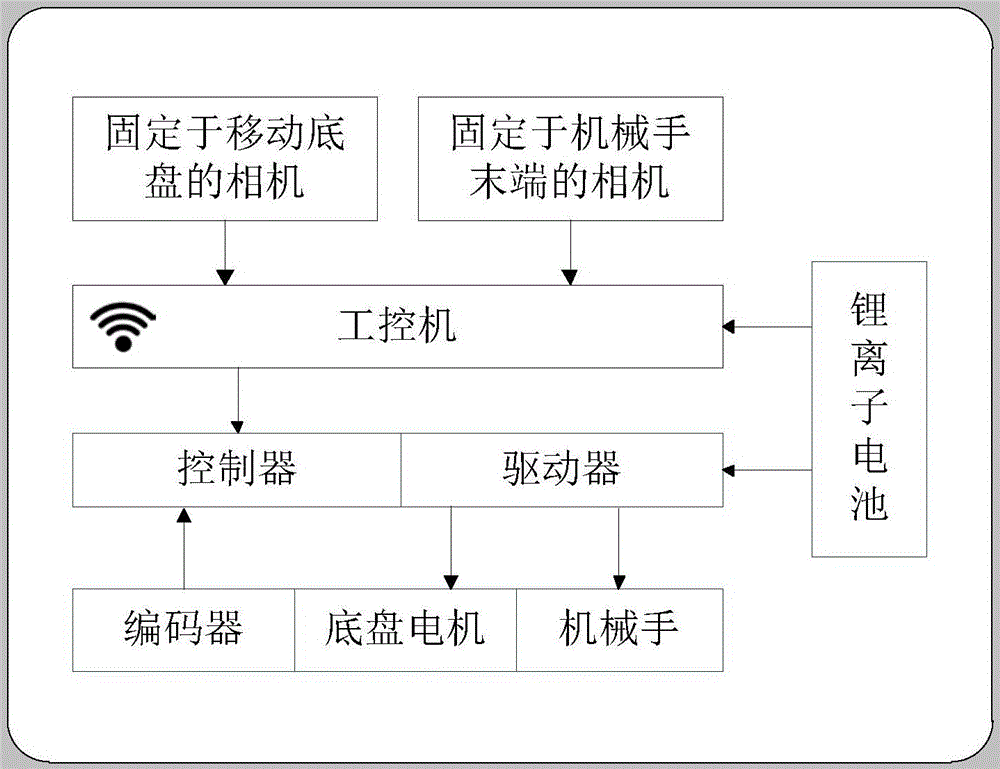
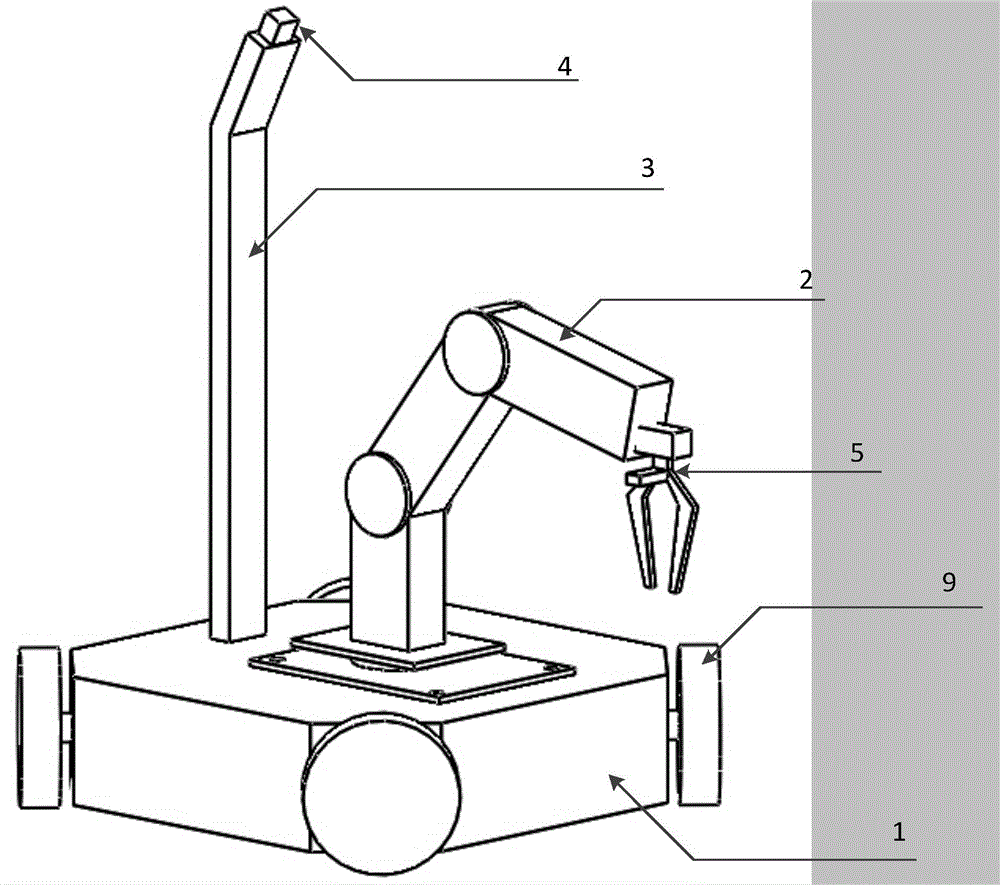
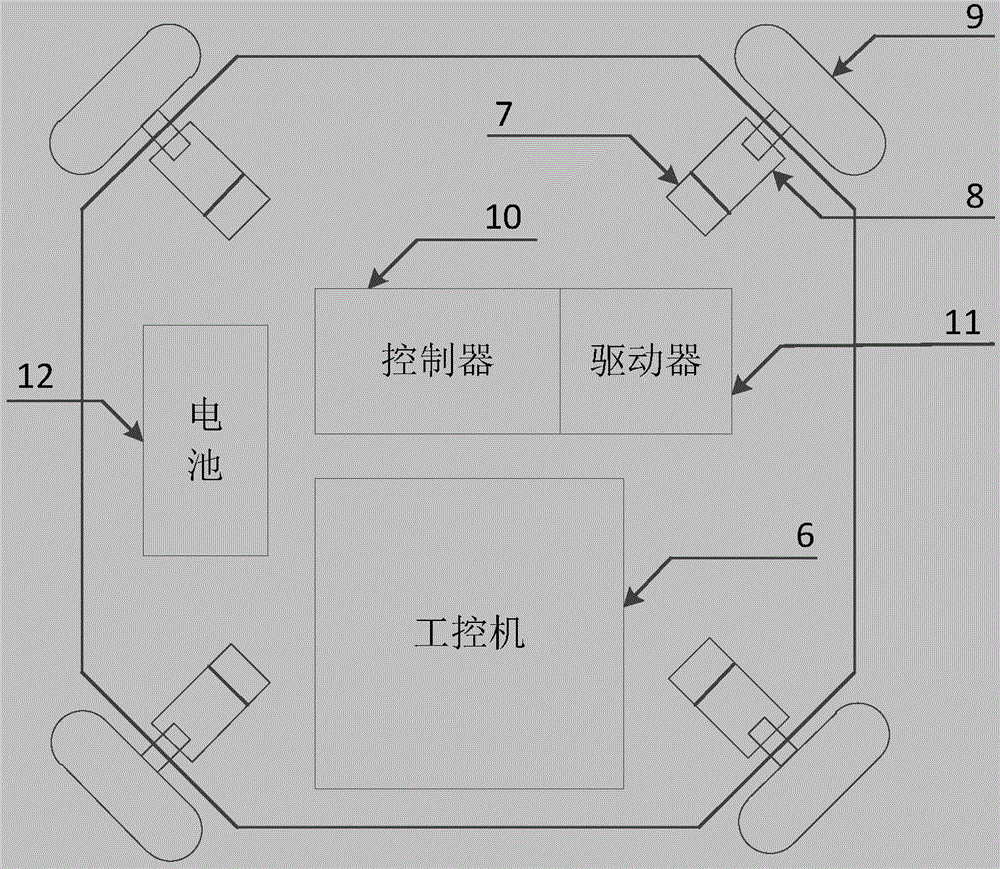
[0024] The measurement and control method of the mobile vision robot of the present invention is mainly to give specific robot action instructions. The instructions include what kind of object to perform which action, and the coordinate position of the target object; calculate and plan the actual movement path of the mobile platform 1, and the industrial computer 6 is based on The path generation operation command controls the mobile platform 1 to turn to the target position; the robot moves to the target position, and the camera 1 4 and camera 2 5 collect images on the moving path in real time, correct the direction deviation and avoid collision; after one or more moves close to the target position , Judging the specific azimuth coordinates of the target object according to the image collected by camera one 4, and correcting the movement path; aft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More